
Abstract
Introduction
Almost all practical industrial processes have nonlinear characteristics to some extent.1,2 For decades, many methodologies have been carried out in the field of nonlinear dynamic system modeling and identification, for example, Volterra series, 3 block-oriented nonlinear models,4–12 neural networks,13,14 support vector machines,15,16 and Markov jump systems. 17 Among these methodologies, block-oriented nonlinear models have received widespread attention due to their simple structure and excellent modeling ability. 18
The Hammerstein and Wiener models represent the most familiar models of the nonlinear block-oriented models. The extension of the Hammerstein and Wiener models is the Hammerstein–Wiener model, which constituted by one dynamic linear block surrounded by two static nonlinear blocks has a great flexibility for describing practical nonlinear systems, such as electric arc furnace system, 19 pH neutralization process,20,21 continuous stirred tank reactor (CSTR), 22 and fermentation bioreactor system. 23 There is an extensive body of research with regard to various learning algorithms of the Hammerstein–Wiener model, mainly including over-parameterization method, 24 subspace method, 23 blind method, 25 iterative method,26,27 multi-signal based method, 28 and maximum likelihood method. 29
In the work by Bai, 24 a two-stage parameter learning method based on least squares method and singular value decomposition technology was proposed for the Hammerstein–Wiener model: the first stage carries out parameter learning of an augmented model, and the second stage separates the unknown parameters of the linear and nonlinear parts using singular value decomposition. Vörös 27 employed least squares–based iterative approach to learn the parameters of the three-block cascade model with output backlash. A new recursive algorithm is derived for the learning of the Hammerstein–Wiener model with dead-zone nonlinearity as input block and polynomial function nonlinearity as output block as in the work by Yu et al. 30 Zhang et al. 31 developed recursive least squares (RLS) algorithm to learn the parameters of the Hammerstein–Wiener model using the key-term separation principle, and the adaptive controller was designed. However, the common representation of the methods mentioned is that the Hammerstein–Wiener model’s learning process contains unknown parameter product of static nonlinear blocks and dynamic linear block, which increases the learning complexity and computational burden. Furthermore, the process disturbance of the Hammerstein–Wiener model is not considered explicitly, which is not consistent with the characteristics of the practical industrial processes. Different from the output disturbance of the model, process disturbance is placed before the static output nonlinear block, which indicates that the output disturbance is large when the process gain is large; on the contrary, the output disturbance is small when the gain is small. 32 From the perspective of process operation, it is more realistic to consider process disturbance.
The least squares methods are the dominant algorithms for system identification and parameter learning of nonlinear dynamic models owing to their simplicity in concept and convenience in implementation. Recently, the RLS methods have been applied for the parameter learning of the Hammerstein–Wiener model. It is acknowledged that RLS methods are unable to generate consistent estimation of the model parameters when the model involves process noise or measurement noise. For this reason, various modified RLS learning schemes have been developed.33–35 Based on the hierarchical identification principle and the auxiliary model identification idea, Wang and Ding 33 presented hierarchical least squares method to learn the Hammerstein–Wiener output error model parameter. Bias compensation principle is combined with the singular value decomposition method for learning the Hammerstein–Wiener model, and an improved online two-stage identification algorithm is introduced in the work by Li et al. 34 By extending the simplified and refined instrumental variable method, Allafi et al. 35 studied the instrumental variable least squares parameter estimation algorithm for the fractional-order Hammerstein–Wiener model. It should be noted that the abovementioned results assumed that unknown static nonlinearities are of polynomial forms. Consequently, if the nonlinear blocks are not polynomial forms or not continuous functions, the approaches do not converge. 36
To circumvent the aforementioned problem, fuzzy model and neural network model have been developed for representing nonlinear blocks of the Hammerstein–Wiener model because of their strong approximation ability for nonlinear functions. Therefore, it is worth emphasizing that the parameter learning of fuzzy system– or neural network–based Hammerstein–Wiener model has essential differences from the parameter learning of single fuzzy model or single neural network model, the difference being that the model structure constraint was imposed by the nonlinear Hammerstein–Wiener model. The parameter learning problem of the Hammerstein–Wiener model needs to take into account nonlinear transformations and linear dynamics altogether, while the parameter learning of the traditional neuro-fuzzy systems only focuses on one global nonlinear transformation. Chen and Wang 37 reported a Hammerstein–Wiener recurrent neural network, in which systematic identification algorithm is used to identify unknown dynamic nonlinear systems. Combining the back-propagation technique with stochastic gradient algorithm, Abouda et al. 38 researched the parameter learning method of estimating jointly unknown parameters and the intermediate variable of fuzzy Hammerstein–Wiener model. However, neural network models have strong self-learning and self-adaptive ability, but lacks transparency and cannot well express the reasoning capability of human brain, while the fuzzy system has no self-adaptive ability, and it has some boundedness in practical applications. The neuro-fuzzy model integrates the learning mechanism of neural networks with the ability of fuzzy inference technology, which can better describe the nonlinear dynamic systems than neural networks or fuzzy systems. As a result, a significant idea is to use the neuro-fuzzy model as static nonlinear blocks of the Hammerstein–Wiener model.
To deal with the issues described above, a novel modeling and parameter learning method for the Hammerstein–Wiener model with disturbance is considered, whose two static nonlinearities are represented using two independent four-layer neuro-fuzzy models, while a dynamic linear block is described using the finite impulse response model. The designed input signals are utilized to achieve the decoupling of parameter learning of output nonlinear block, linear block, and input nonlinear block. First, the output static nonlinear block parameters can be estimated using two sets of separable signals with different sizes. Moreover, correlation analysis approach is developed for determining the unknown parameters of linear block. Finally, parameter unbiased estimation of the static input nonlinear block is achieved using least squares method based on input and output random signals. The main contributions of this paper are as follows:
In our previous work, 39 the input signals that consist of binary signal and random multistep signal are used to identify the Hammerstein–Wiener model. In contrast, in this work, the first part of the special input signal is extended to include more general independent separable signals, such as binary signal, sine signal, and Gaussian signal.
Unlike the synchronous parameter learning methods,23,24 the designed input signals are implemented to completely separate the parameter learning problem of output nonlinear block, linear block, and input nonlinear block, which significantly simplifies the parameter learning process of the Hammerstein–Wiener model.
The correlation analysis algorithm is employed to learn the unknown parameters of the dynamic linear block; thus, the process disturbance can be compensated by the calculation of correlation function.
The modeling and parameter learning problem of the Hammerstein–Wiener model is briefly presented in section “The neuro-fuzzy Hammerstein–Wiener model.” The three-stage parameter learning algorithms of the neuro-fuzzy Hammerstein–Wiener model with disturbance are discussed carefully in section “Parameter learning of the neuro-fuzzy Hammerstein–Wiener model.” Section “Simulation results and analysis” gives the simulation results of complex nonlinear industrial processes. Finally, we draw some conclusions in section “Conclusion.”
The configuration of neuro-fuzzy Hammerstein-Wiener model
The Hammerstein–Wiener model
As depicted in Figure 1, we consider the following Hammerstein–Wiener model with disturbance
33
that consists of one dynamic linear block,

Structure of the Hammerstein–Wiener model.
The Hammerstein–Wiener model, defined in Figure 1, is expressed by the relationships of three blocks




where
In the dynamic block, the current output depends on its past values. The dynamic linear block can be described as a finite impulse response, space state model, transfer function, and so on. Here, a finite impulse response model is considered, that is,
In the parameter learning method of the Hammerstein–Wiener model, a crucial challenge is to discover an effective representation of static nonlinear blocks. A good modeling should not only correctly represent the static nonlinear block but also simplify the parameter learning procedure. By analyzing the superiorities of fuzzy systems and neural network models in section “Introduction,” the proposed neuro-fuzzy models are applied to the Hammerstein–Wiener model with disturbance in the next study.
The neuro-fuzzy Hammerstein–Wiener model
Four-layer neuro-fuzzy models are designed to formulate static input nonlinear block and static output nonlinear block, as shown in Figure 2.

The neuro-fuzzy model.
Furthermore, the intermediate variables


where
According to the given structure of the Hammerstein–Wiener model, the neuro-fuzzy Hammerstein–Wiener system consists of two static nonlinear blocks described by two independent neuro-fuzzy models and a dynamic linear block described by finite impulse response model. The elaborate structure is shown in Figure 3.

Configuration of neuro-fuzzy Hammerstein–Wiener system.
For the available observed data set and given order

where
Parameter learning of the neuro-fuzzy Hammerstein–Wiener model
In this section, a parameter learning process of neuro-fuzzy Hammerstein–Wiener model with disturbance using designed input signals is concretely discussed. The objective of the proposed learning method is to acquire the parameter estimation of three blocks.
The designed input signals are made up of separable signals and random signals, which are implemented to activate the Hammerstein–Wiener model, bringing out completely the parameter learning of three blocks (i.e. output nonlinear block, linear block, and input nonlinear block). In the parameter learning of the Hammerstein model, from the perspective of static nonlinear block, our previous research work 4 has demonstrated the relationship of input–output signals under separable signals. Taking advantage of the idea of this work, further research of the Hammerstein–Wiener model is discussed.
Theorem 1
With the static input nonlinear block of the Hammerstein–Wiener model, if the model input

where
The certification process of Theorem 1 can be done by referring to the method by Li and Jia 4 and hence it is omitted here.
Theorem 1 shows that
Based on the above analysis, the parameter learning process of the Hammerstein–Wiener model with process disturbance is specifically analyzed.
Learning the static output nonlinear block parameters
In this subsection, the result of Theorem 1 is employed in the Hammerstein–Wiener model. Two sets of separable input and output signals with different sizes are adopted to learn the parameters of the static nonlinear block. In the parameter learning process, we need to determine the center,
The output signals


According to equations (2) and (3), equations (9) and (10) can be rewritten into a linear regression form as


Multiplying both sides of equations (11) and (12) by




Using Theorem 1, we obtain


where
Combining equation (17) with equation (18) yields

where
Furthermore, equation (29) can be defined as

Substituting equations (9) and (10) into equation (20), we obtain

Let

Dividing both sides of equation (22) by

Let

Assume

Using least squares method, weight can be obtained by the following formula

where
Equations (27) and (28) are used to calculate


Learning the dynamic linear block parameters
The input and output data of separable signals are implemented for learning the unknown parameter of the dynamic linear blocks in this subsection.
According to equation (17), the dynamic linear block can be equivalently rewritten as

where
In the last subsection, we have estimated the static nonlinear block parameter, so correlation function,
Assume

where
Define a cost function

Taking the derivative of equation (31), we obtain

Let

Multiplying both sides of equation (33) by the inverse of matrix,

The following formulas are used to calculate


Learning the static input nonlinear block parameters
Based on two sets of separable signals, we have estimated the input nonlinear block parameter and the linear block parameter. Next, we discuss how to learn the static input nonlinear block parameters by means of the available input–output of random signals.
The learning procedure of input nonlinearity characterized by neuro-fuzzy model is to calculate the center,
From equations (1) and (3), we have

Using equation (5) yields

For simplicity, equation (38) is rewritten as

where
Defining a quadratic cost function according to equation (39)

Using least squares estimation method, we get

According to equations (39) and (41), it is easy to obtain

Note that the noise

Combing equations (42) and (43), we get

The unbiased estimation of the input nonlinear block parameter,
For simplicity, the flowchart of learning the Hammerstein–Wiener model parameters is shown in Figure 4.

The flowchart of learning the Hammerstein–Wiener model parameters.
Simulation results and analysis
Two numerical cases of Hammerstein–Wiener model with disturbance are offered to demonstrate the effectiveness of the proposed parameter learning algorithm.
Case 1
The nonlinear Hammerstein–Wiener model with disturbance is taken into account in which the input nonlinear block is represented using discontinuous function

where the noise
Define the parameter estimation error of dynamic linear block at time
Two sets of binary signals with different sizes are 200 binary signals with 0 or 4 and 200 binary signals with 0 or 2, and 400 random signals between [0, 4] are employed to learn the Hammerstein–Wiener model parameters. Figure 5 shows the inputs and outputs of the Hammerstein–Wiener model.
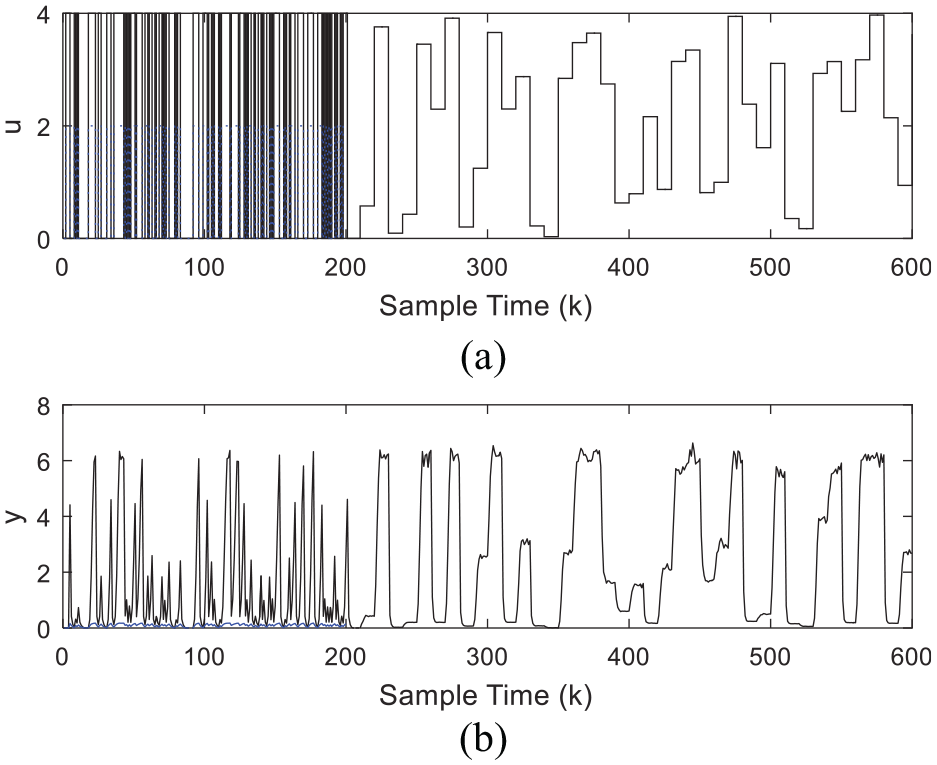
(a) Input signals and (b) output signals.
At first, two sets of binary signals with different sizes of 200 binary signals with 0 or 4 and 200 binary signals with 0 or 2 are employed to learn static output nonlinear block parameter. Set parameters

The estimation of the static output nonlinear block.
Next, inputs and corresponding outputs from training samples of binary signals are employed for learning the unknown parameter of the linear block. In this study, we select 5000 binary signals with 0 or 4 for certifying the effectiveness of the correlation analysis method.
From Table 1 and Figure 7, the proposed correlation analysis algorithm can obtain more accurate parameter estimation of dynamic linear block than the RLS algorithm 41 for uncertainty process disturbance. With the increase in noise-to-signal ratio, the proposed learning algorithm has more obvious advantages.
The parameter learning results of dynamic linear block under binary signal.

RLS: recursive least squares.
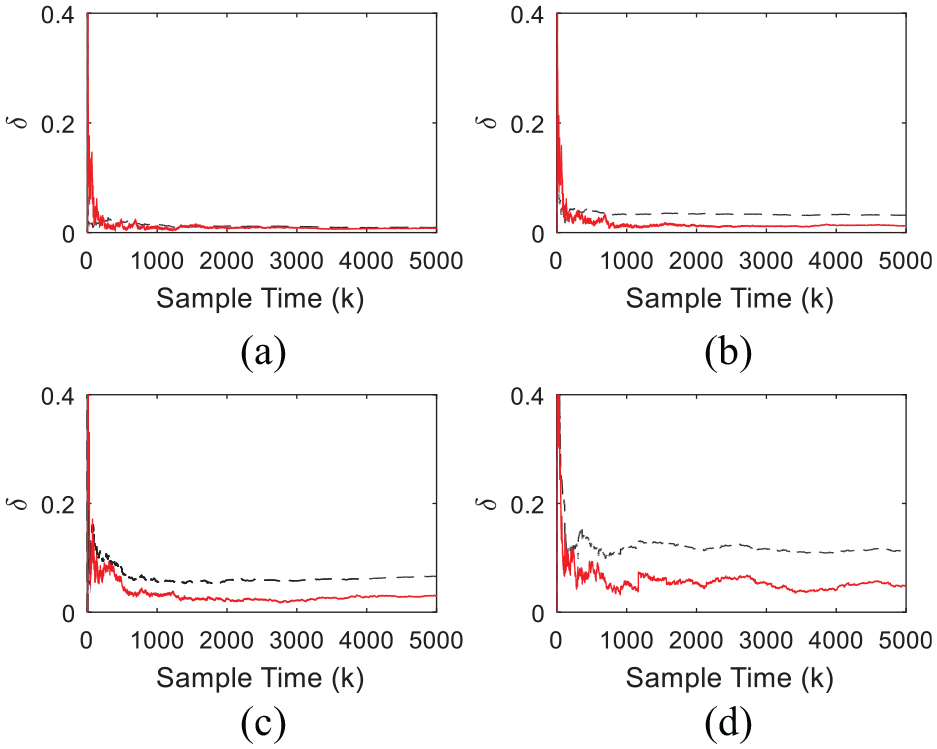
The correlation analysis algorithm (red solid line) and the recursive least squared algorithm (black dashed line):(a)
Based on the inputs and outputs of the random signal, the parameters of the input static nonlinear block are learned using the design parameters

Comparisons of the approximation of the static input nonlinear block.
Finally, to verify the availability of the proposed parameter learning method, the polynomial model–based input nonlinearity is also constructed utilizing the same observed input and output data. The polynomial model is as follows

where
Errors of various polynomial models and the proposed method.
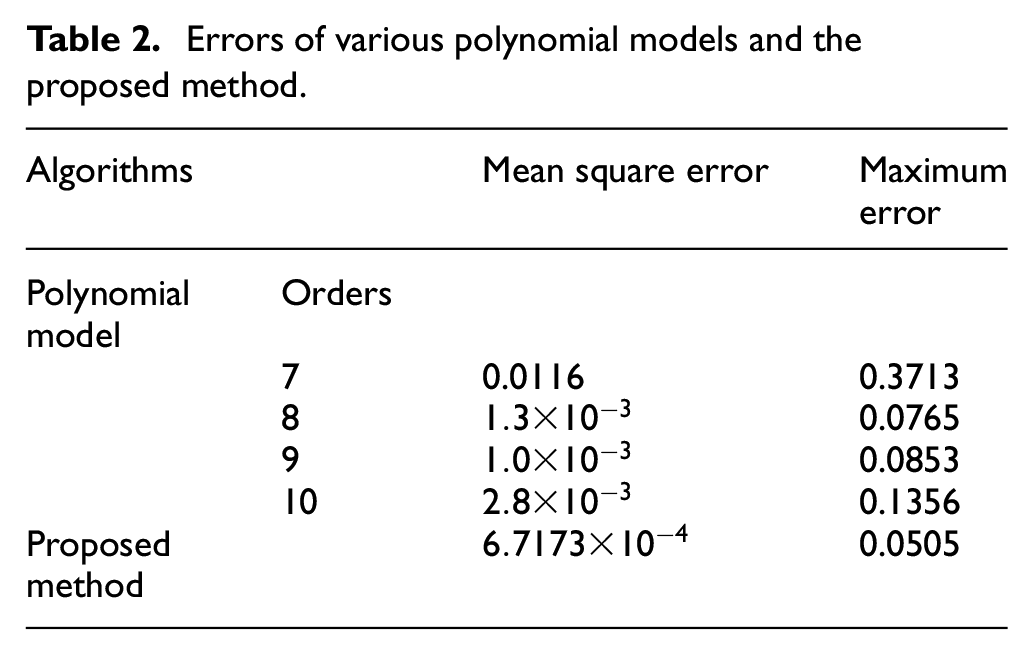
From Table 2 and Figure 8, the proposed parameter learning algorithm has smaller mean square error and maximum error than the polynomial model algorithm. As a result, the proposed parameter learning algorithm can learn well the unknown parameter of the Hammerstein–Wiener model with uncertainty process disturbance.
Case 2
In this case, we take into account the Van de Vusse reaction kinetic process:

where
Nominal operating condition and model parameters of CSTR.

CSTR: continuous stirred tank reactor.
The objective of CSTR is to regulate the concentration of component B,

The designed input signals of the Hammerstein–Wiener model.
Apply the proposed neuro-fuzzy Hammerstein–Wiener system to the design of controller; the designed control approach of the Hammerstein–Wiener model is shown in Figure 10. The design principle of the Hammerstein–Wiener model is to get rid of input and output nonlinearities and convert the nonlinear Hammerstein–Wiener system into linear system; then the linear system is controlled by the linear controller. In this study, the nonlinear proportional–integral (PI) controller with

where

Nonlinear control system for the Hammerstein–Wiener system.
In Figures 11 and 12, the control performance of the linear PI controller and the nonlinear PI controller is given. According to Figures 11 and 12, it is noticeable that the traditional linear PI controller is unable to achieve good control effectiveness with regard to nonlinear Hammerstein–Wiener model. In particular, it results in a sluggish response when the value of the set point is 0.1. Nevertheless, an oscillatory response is discovered when the value of the set point is −0.5. By comparison, the designed nonlinear PI controller in this paper can effectively balance the sluggish and oscillatory response for positive and negative set points. As a result, the nonlinear PI controller can derive good tracking performance under the nominal operating condition.
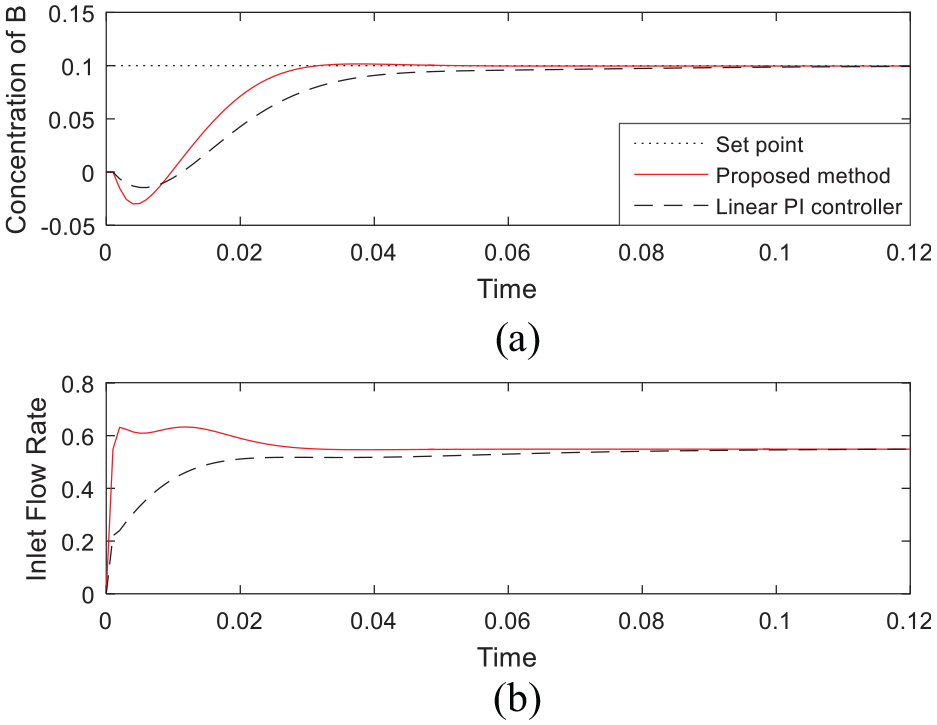
Concentration and flow rate of set point 0.1.

Concentration and flow rate of set point 0.5.
Conclusion
This paper develops a modeling and parameter learning method for the Hammerstein–Wiener model with uncertainty disturbance in which two static nonlinear blocks surround a dynamic linear block. In modeling, two static nonlinearities are represented using independent neuro-fuzzy models, while a dynamic linear block is described using the finite impulse response model. The designed input signals are utilized to analyze the Hammerstein–Wiener model with uncertainty disturbance, resulting in the decoupling of parameter learning of static output nonlinearity, dynamic linear block, and static input nonlinearity. First, the output static nonlinear block parameters can be estimated using two sets of separable signals with different sizes. Moreover, correlation analysis algorithm is developed for learning the parameter of dynamic linear block based on input and output of a set of separable signal. Finally, parameter unbiased estimation of static input nonlinearity block is achieved using least squares method based on input and output of random signal. In numerical cases, two typical Hammerstein–Wiener models are employed to propose the learning algorithm: a discontinuous function and industrial CSTR. The results show that the proposed learning method yields reliable learning results with a high degree of accuracy and those which are minimally affected by disturbance.