
Abstract
Keywords
Introduction
Road traffic accidents and the subsequent injuries or fatalities still remain a problem that society hopes to solve. While recent decades have seen major improvements in vehicle active and passive safety, the situation still remains serious. Death on the roads is one of the top 10 causes of premature death and every day in Europe more than 55 vehicle occupants and other vulnerable road users are killed.1,2 Global initiatives, such as the UN Decade of Safety and European ambitions for zero road fatalities (Vision Zero) by the middle of this century, have provided momentum for large scale research programmes and industry led initiatives to address the problem.3–5 Volvo, a company historically associated with vehicle safety, also added to the impetus by stating their ambition that no one should be killed or seriously injured in a new Volvo after 2020. 6
In existing vehicles, the protection of occupants and other vulnerable road users is provided through active and passive safety. Active safety includes systems that operate to support the driving task by assisting in for example, braking or steering in order to avoid or minimise the consequences of an accident. In the history of vehicle safety, these technologies are a more recent technology evolving over recent decades and providing some of the building blocks for autonomous vehicles. Passive safety involves providing protection should an accident occurs. It includes the provision of crashworthy structures, seat belts and airbags. These technologies have been evolving since the middle of the last century, but it is here where a significant challenge is developing for autonomous vehicles, and it is in this area that the research described here has a focus.
Given that a large percentage of vehicle accidents are caused by human error, 7 a great deal of hope for progress in this area is based on the development of higher levels of automated driving and Advanced Driver Assistance Systems (ADAS). The ambition to develop self-driving cars has led to one of the most challenging and disruptive phases in automotive development since the invention of the motor vehicle. As such, the introduction of automated driving technologies is progressing incrementally through a series of levels starting from the current situation where a driver controls a vehicle and culminating in the arrival of vehicles that are fully autonomous. The Society of Automotive Engineers (SAE) defines this ultimate outcome as Level 5 (L5) driving and there is an expectation that vehicles with this capability may reach the market as early as 2030. 8
A major challenge along the way will be to ensure that, as the driving task is reduced, vehicle occupants remain protected in the event of a crash. The utopia of a road network where crashes never occur, and passive safety is not required, is an aspiration, but in the meantime, a transition is needed where existing vehicle safety systems evolve alongside automated driving technologies. One of the major advantages envisaged with a completely driverless car (L5) is that the driver will be able to engage in other activities, which may be business or leisure related. In order to fully exploit this, the seats should be able to rotate into new positions. These relaxed seating positions lead to the concept that vehicle interior can be transformed into a ‘Living Room”. Typical examples of how this might be configured is shown in Figure 1.

Alternative planned seating in future vehicles according to Östling et al. 9
The new seating arrangements present a challenge. Current vehicle design involves physical crash testing of vehicles using a prescribed set of legislative tests to ensure that passive safety systems perform as required. These tests cover a range of established driving scenarios such as frontal crashes, side impacts or vehicle rollovers. Although they cannot represent every crash occurring in the real world, they provide a good representation of the types of crash where vehicle occupants, sitting in established and well-understood forward-facing positions, will benefit from good levels of crash protection. This current protection could however be compromised, if occupants are allowed to exploit the opportunities provided by a self-driving vehicle and happen to be in non-conventional positions at the time of a collision.
Head impact against the vehicle interior has long been understood to have serious consequences, and passive safety protection, in the form of seat belts and airbags, has evolved to deal with this. However, this protection has developed to an advanced state over many decades specifically for occupants sitting in a forward-facing position. Rotating the seats presents new challenges to protect the occupants from head impacts with the vehicle interior or even each other.
Current crash test procedures are based on the use of dummies, or more correctly Anthropometric Test Devices (ATDs), to measure the potential injuries to an occupant. However, ATDs are developed for existing seat arrangements, and are not able to represent occupants’ motion during low-g pre-crash events, as they do not include the muscle activations that would be present in a real occupant. While this is not such a problem for conventional vehicles, it will be in future when automated emergency and braking interventions affect the posture of occupants who may already be in an unexpected position. Mature and extensive research into airbag technology already exists to protect conventionally seated occupants who may be Out-of-Position (OOP), while they engage in a minor task, such as adjusting a radio or heating control. 10 The scope to be Out-of-Position (OOP) in an autonomous vehicle is vast in comparison, and current ATDs are not designed to represent these scenarios.
As with almost all automotive development processes, where a physical test is performed, an equivalent virtual test is also used. The development of computer models that can effectively represent the pre-crash motion of vehicle occupants in an autonomous vehicle taking into account the different postures and muscle activation of an occupant is the area of research described in this paper. In order to obtain more realistic representations of occupants, biofidelic Active Human Body Models (AHMs) have been developed. These models are intended to provide both predictions including pre-crash posture change and in-crash injury risk, predictions that would not be possible using virtual ATDs. Traditional models of ATDs are able to make use of computationally efficient Multibody Systems (MBS) representation. In order to deliver this level of model detail required for an AHM a different approach is required. These models make extensive use of non-linear Finite Element Methods (FEM). These models are complex and require extensive computational effort resulting in long computer simulation times that can restrict opportunities to conduct detailed parametric studies. This in itself is a problem, as the requirement to provide occupant crash protection in an autonomous vehicle, where the occupants may be in a wide range of seating positions and postures, by nature demands the use of extensive parametric studies. The amount of time required to perform simulations with complex AHMs is too long to support design investigations for a multitude of scenarios. A more efficient approach is needed.
The work described in this paper investigates computational methods that can assist the development of efficient analytical processes for these applications. To test the methodology, a scenario investigating the occupants’ head kinematics envelope during a pre-crash phase is selected, whilst considering a range of rotated and reclined seat arrangements. The simulation environment used in this investigation involves creating a Reduced Order Model (ROM) of the occupants’ kinematics using simulations with the Simcenter Madymo Active Human Model (AHM) in combination with a Machine Learning (ML) method based on Hexagon ODYSSEE Lunar software. In a previous study 11 the authors validated the kinematics response of the AHM using omnidirectional pre-crash manoeuvre data sets from OM4IS (Occupant Modelling for Integrated Safety, International Research Project, 2009–2012) and UMTRI (University of Michigan Transport Research Institute).12,13 This work proved the capability of the AHM receiving a CORA (Correlation and Analysis 14 ) score of 0.84 (good).
In the next section of this paper, a Design of Experiments (DOE) study using the AHM for rotated seating arrangements and different seat back angles is described. This study was carried out for an extreme braking manoeuvre with vehicle decelerations of the order 1 g. The resulting occupant kinematics were then input to the ROM using the Proper Orthogonal Decomposition (POD) method implemented in Hexagon ODYSSEE Lunar, in order to extract all possible head kinematics within the seating design domain chosen by the occupant. The kinematics responses computed by the ROM were then validated through a comparison with the kinematic responses obtained with simulations using the Simcenter Madymo AHM.
Method
In order to compute the full occupant’s head kinematics in a rotated seat arrangement, the study has used the Simcenter Madymo AHM Version 3. Human Body Models may be based on a non-linear finite element or a multibody systems approach. Due to the complexities of modelling a human body, the contacts that can occur with the vehicle interior and restraint systems, and the calculation of injury metrics, the computer simulation time is extensive. The Simcenter Madymo AHM is based on a multibody systems approach, does offers computational efficiencies compared with the finite element method. The Simcenter Madymo AHM has also been proven to provide good predictions of occupant kinematics during a pre-crash scenario and has been correlated using the CORA rating methodology against OM4IS test data for occupants wearing a lap belt and validated against UMTRI test data for occupants wearing a three-point seat belt. 11 During this study, the Simcenter Madymo AHM standard settings were found to be the most representative for occupants wearing a three-point seat belt, and as such those settings have been retained for the work presented here.
For the work presented here, the baseline Simcenter Madymo seat model has been used. This is representative of the SISS standard seat model 15 that provides a realistic shape, dimensional and stiffness properties of the seat cushions. As such the SISS model is widely used in the automotive sector for concept studies and is a good choice for investigation.
The seat, shown in 360° relative to the forward driving direction using the methods outlined in Kitagawa et al. 16 and Jorlöv et al. 17 In order to achieve this rotation, and also to recline the seat, the seat belt upper D-Ring is connected to the seat itself, rather than to the B-Pillar as would be expected in a conventional vehicle.
In the model, the actual seat is not rotated. The effect of rotating the seat relative to the forward driving direction is instead achieved by rotating the direction of the 1 g pre-brake deceleration pulse. This is shown in Figures 2 and 3 using the red arrow to represent the acceleration angle (AA). During the study, simulations were performed at increments of 22.5° as the acceleration angle was rotated through 360°. Additionally, the sled is capable to also alter the backseat angle, as illustrated in Figure 4, from 20° to 60° in increments of 8°. Those increments have been chosen in order to balance computational efforts and the precision of the undertaken design exploration.

Rotated seat arrangement, top view red arrow indicating driving direction and direction of pulse application (0°–360°).

Isometric view with three-point seat belt.

Seatback angle change capabilities. Left 20°, middle 44° and right 60°.
The deceleration pulse is bi-linear with time ramping up from 0 to 1 g between 0 and 0.3 s and remaining constant until the simulation completes at 2 s, as can be observed in Figure 5. This is consistent with the pulse used in the OM4IS study, 12 presented in Reed et al., 13 and can be considered as extreme pre-braking and lane change respectively.

Generic 1 g pre-brake pulse rise to 1 g within 0.3 s.
Predicting the occupant head kinematics can be approached in two ways, either extracting the maximum head motion only or extracting the head motion as a function of time. The former can be achieved by performing a DOE study and then using standard response surface methods to visualise and predict the maximum head excursion. This however is not entirely useful as, for example, the head relative motion to a deploying airbag would not be captured. It is therefore necessary to use a predictive method that considers the time domain which would also capture the maximum head excursion; hence the approach is more versatile and meaningful. The use of machine learning, in particular the application of the Proper Orthogonal Decomposition (POD) method, is very well suited to address this requirement. This research will use the software Lunar, which is part of the ODYSSEE suite from Hexagon 18 and is capable to apply the POD method.
Machine Learning (ML) is a process that uses an algorithm to analyse data, learn from it and make a statement or prediction. ML and Computer-Aided Engineering (CAE) both have the same goal: to predict the behaviour of a system with the help of data analysis and mathematical models. ML can be integrated into the existing CAE process landscape in order to gain time benefits. The integration of ML into the CAE process allows the results from multiple DOE databases to be captured, processed and ultimately learned from. Based on the relationships from input and output from past simulations, so-called Reduced Order Models (ROM) can then be created. 19 ROM models can then be used to predict new responses in seconds or even in real-time. ROM belongs to the fusion or dimensional reduction technique category and can be understood as a simplification of a complex model. In order to build a ROM model, ML techniques such as singular value decomposition, support vector machine or regression are used. The starting point is always a DOE analysis that covers the design space as best as possible. The creation of a ROM model can then be divided into three steps: Decomposition, Reduction and Reconstruction. Decomposition can be seen as a reduction tool, which is used to reduce high dimensional data to the key features necessary to analyse, understand and describe the data. One of the most widely used methods for decomposing data is the Proper Orthogonal Decomposition (POD) method, also applied in Kayvantash et al. 19 For the subsequent interpolation of the prediction data, the Adaptive Radial Base Function (ARBF) method is used. Both methods, POD and ARBF, are used as standard settings in ODYSSEE Lunar and recommended for time history problems as given by Kayvantash. 18
The study described was conducted using the following steps with the ultimate purpose to investigate whether the AHM’s head kinematics inside the cabin can be predicted in all possible scenarios:
1. Compute a range of scenario permutations by performing the DOE using a full factorial method.
(a) Acceleration Angle (AA): 0°–360° in steps of 22.5°
(b) Seat Back Angle (SBA): 20°–60° in steps of 8°
2. For each SBA, the AHM was manually positioned in Simcenter XMADgic (Dedicated XML editor for Madymo preprocessing), using the joint positioning menu. A gravity computation was then performed in order to ensure that the AHM is resting correctly in the seat. The final computed posture was finally remapped back into each DOE permutation.
3. All the DOE simulations with the AHM in a stable posture are then submitted in Simcenter Madymo.
4. A ML model was then created to capture all head excursions (
5. A first level of ML validation accuracy will be performed by keeping the SBA constant and varying AA, in order to investigate Hexagon ODYSSEE Lunar capabilities. The CORA value of this ML prediction was compared to the Madymo
6. The final level of kinematics validation, including AA and SBA was then performed and the same CORA technique from step 5 was applied.
7. The derived and validated ML model will then be used to plot the pre-crash kinematics envelope at the time of the respective maximum displacement and over time.
Results
Computation of DOE permutations for ML model generation
DOE permutations are computed and plotted on the cabin top view (
Top view of the head kinematics generated by the DOE, for a SBA of 20°.
Figure 6 represents the maximum head excursion for a SBA of 20° for the 16 AAs considered in the time domain. Each excursion is bound using the potential special dispersion which was defined in previous work,2,7 represented by the error bars. The DOE data has been used to create a ML ROM in Hexagon ODYSSEE Lunar, which will be tested in the next section.
Testing the ML model – constant SBA with a changing AA
In this section, the values of SBA have been taken directly from the full factorial permutation (20°–60° in steps of 8°) and the AA values taken randomly between 0° and 360°, as per Table 1 (column 1, 2 and 3). Cases 1–6 are computed using Simcenter Madymo and are compared to their respective ML predictions, as shown in Table 1 (column 4 and 5) and plotted in Figures 7 and 8.
ML validation test, varying AA and keeping SBA values as per the DOE.


ML prediction of an AHBM’s head motion, for a varying AA.

Kinematics overlay between ML predictions (red) and Madymo (dark grey) for case 2. Left to Right: 0, 0.5, 1.0 and 1.5 s.
From Table 1 it can be observed that the minimum CORA rating obtained is 0.91 (excellent) for Case 4. The average CORA score for this test is 0.96, indicating an excellent correlation between the ML model and the simulations done using Simcenter Madymo. This evaluation is confirmed by the comparison of the head trajectories, illustrated in Figure 7. The Simcenter Madymo results are drawn in black, and the kinematics obtained using the ROM in red. From Figure 7 it can be observed that the trajectories for the validation cases 1–6 match excellent. Cases 1–6, rated excellent, are illustrated in Figure 8, where the total kinematics of the Simcenter Madymo results (dark grey) overlay the ROM (red) for case 2. Again, an excellent correlation is observed.
Testing the ML model – with a changing SBA and AA
In this section, the values of SBA and AA have been selected from the initial DOE, as per Table 2 (column 1, 2 and 3). The quality of the kinematic responses are listed in column 4 and 5, and the kinematics illustrated in Figures 9 and 10.
ML validation test, varying AA and SBA values outside the DOE.


ML prediction of an AHBM’s head motion, for a varying AA and SBA (maximum excursion).

Kinematics overlay between ML predictions (red) and Madymo (dark grey) for Case 7. Left to Right: 0.5, 1.0, 1.5 and 2.0 s.
From Table 2 it can be observed that the minimum CORA rating obtained is 0.68 (good) for Case 7. However, the average CORA score for this test is 0.92, indicating an excellent correlation between the ML model and the simulations done using Simcenter Madymo. Except for case 7, the ratings obtained are excellent. Thus, case 7 can be characterised as outlier. This evaluation is confirmed by the comparison of the head trajectories, illustrated in Figure 9. The Simcenter Madymo results are drawn in black, and the kinematics obtained using the ROM in red. From Figure 9 it can be observed that the trajectories for the validation cases 8–12 validation cases match excellent. For Case 7 it can be observed that the deviation between the ROM and the Simcenter Madymo results occurs timewise late and is with respect to the total displacement small (∼25 mm). Exemplary for case 7 shows Figure 10 the total kinematics overlay between the Simcenter Madymo results (dark grey) and the ROM (red). A good correlation is observed.
It has to be noted that in Case 7, the difference between the actual Madymo response and the ML prediction does not exceed 30 mm.
Applying the ML model – kinematics envelop prediction for 20° SBA
This section applies the derived and validated ML model to derive the total pre-crash head kinematics envelope for a 20° SBA scenario. For this purpose, the ML model has been asked to calculate the kinematics response for 500 AAs, evenly distributed in the domain 0°−360°.
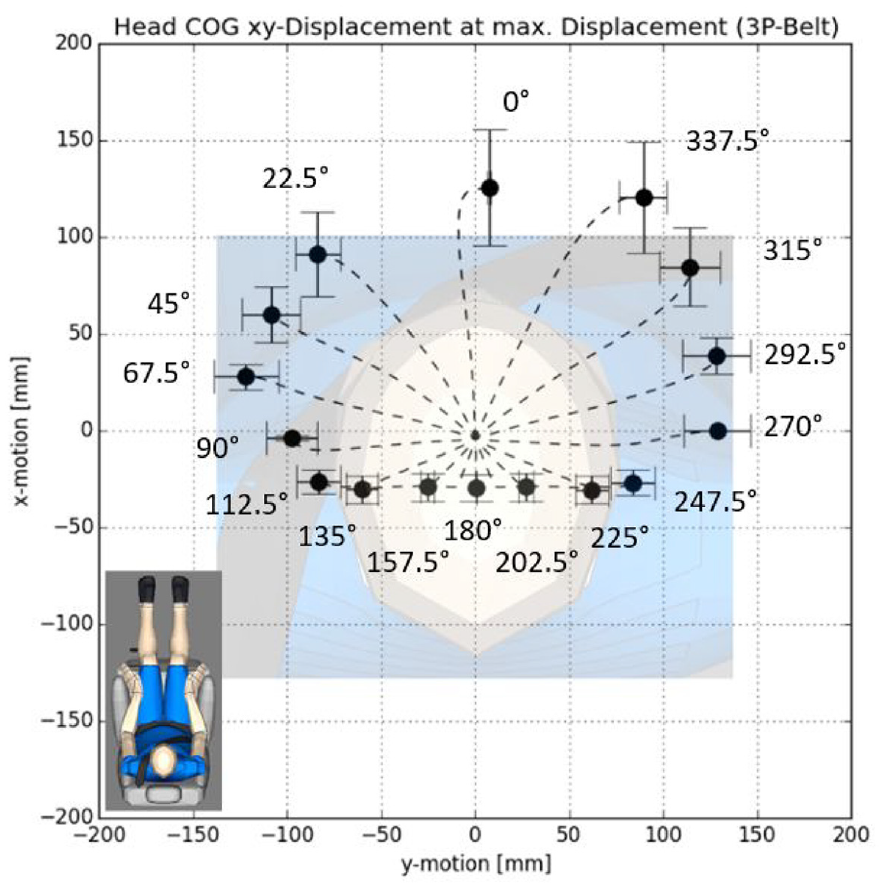
Figure 11 illustrates the derived kinematics envelop at the time of maximum displacement for each considered AA. The black dots indicate the median, while the grey areas indicate the dispersion corridors evaluated in previous research,
11
replacing the error bars for clarity reasons. From Figure 12, the kinematics envelop at the time

Kinematics envelope for 20° SBA at maximum displacement.

Kinematics envelope for 20° SBA at

Kinematics envelope for 20° SBA at

Kinematics envelope for 20° SBA at
Discussion
Once the ROM is established, occupants’ kinematics can be computed in seconds and animations under a minute, which is a significant improvement from a standard Simcenter Madymo simulation, which takes around 1.5 h on a standard laptop. The ROM generated by Hexagon ODYSSEE LUNAR received a combined excellent CORA score of 0.94, however one outlier has been identified (Case 7), where the CORA rating is 0.68, hence good. 20 This outliner relates to a (nearly) frontal facing position, with the backrest at 25° standard position. This area of the DOE is where the largest relative head motions are found, with few DOE support points in relation to the amount of motion. This, in addition to the fact that minor numerical irregularities may have also occurred in the Madymo simulation, for example, in the contact between the belt and the upper body or shoulder, can be named as a possible explanation for the deviation. The ML prediction is ∼25 mm away from the true CAE solution, which is showing that such techniques can provided useful information for fast engineering decisions. It is suggested to add more DOE points in the frontal acceleration area to improve the results’ accuracy further as a suitable amount of DOE points must be available in order to obtain good results.
The provided kinematics map of the occupant’s head as a function of time and as maximum over time allows to investigate the relationship between the head position overlap with an airbag deployment envelope, as airbags are not designed naturally to work in extreme out-of-position (OOP) cases. Such a map can also be useful in order to design the vehicle trim packaging, by preventing or mitigating the occupant’s head contact forces. It is unlikely that contacting the head against pillar trims in evasive manoeuvre will cause any fatal injuries, however it can be envisaged that concussions could occur.
It could be foreseen that this study could be also performed by using lap belted occupants, in which the head excursion could be more pronounced and cause head-to-head contacts in simple swerving manoeuvres.
Conclusions
Autonomous vehicle sudden manoeuvres will influence occupant’s kinematics, which could cause serious concern, as occupants will be in extreme out of position (OOP), due to the fact that the seat is not simply facing forward, but rotated and with a potentially near horizontal seat back angle.
This research has shown for the first time that the occupants’ kinematics, as a function of time, could be predicted, considering all possible seat configurations by using a machine learning reduced order model (ROM) with the Proper Orthogonal Decomposition (POD) method. The work has demonstrated that, with using a ROM derived by Hexagon ODYSSEE Lunar, it is possible to compute the full head kinematics envelope of a seated occupant in a L5 vehicle interior and hence provide new information for the design of future autonomous vehicles. An excellent correlation between the ROM and the Simcenter Madymo results has been demonstrated using 80 evenly distributed DOE design points. However, care must be taken on the design of the underlying DOE in order to receive a ROM of high predictive quality. Predicting occupants’ position in any rotated seat arrangements can help designing a safer cabin interior, by preventing head contact to interior trims, as well as fellow passengers, especially if lap-belts are worn. This finding is also crucial for understanding how the person is positioned should a potential collision occur. It could be envisaged that thanks to the speed of ML, that such occupant position predictions could be part of the main vehicle on-board safety system, which could then maximise safety.
Limitations and future work
The Simcenter Madymo 50th percentile AHM used in this study has been correlated to OM4IS tests 12 and validated to UMTRI tests 13 in previous work. 11 Therefore, as suggested in Diederich et al., 11 the standard activation parameters have been used for this study considering a three-point belted occupant. The Simcenter Madymo seat model utilised here is used in industry for concept design because of its realistic dimensions, shape and cushion stiffness. 15 The application of seats and seatbelt models other than the ones used in this study may change the presented kinematics results, however the methodology proposed is transferable. The applied pre-brake pulse can be considered as a generic extreme pre-braking or lane change type. The presented kinematics results will change if a different pulse is used, for example, a lower pulse than the one applied may result in less pronounced head excursion. Further research is needed concerning the in-crash phase and its injury outcome in automated driving scenarios. Consequently, it is proposed to study the application of ML for the in-crash injury outcome and for lap-belted occupants.
{kind=link}