Recently, an approximation technique was presented for solving strong nonlinear oscillators modeled by second-order differential equations. Due to the arising of an algebraic complicity, the method fails to determine suitable solution of some important nonlinear problems such as quadratic oscillator, cubical Duffing oscillator of softening springs, and pendulum equation. However, suitable solutions of these oscillators are found by rearranging only an algebraic equation related to amplitude and frequency. The determination of solutions is simpler than the original version.
The classical perturbation methods1–5 were developed to investigate weakly nonlinear problems modeled bywhere . Herein, is known as the unperturbed frequency, is the constant, and is a nonlinear function. Then classical methods6–9 were modified to overcome this limitation and applied to solve strong nonlinear problems, where . On the other hand, some analytical techniques such as the homotopy perturbation method (HPM),10–15 variational iteration method (VIM),16–19 generalized homotopy method,20 harmonic balance method (HBM),21,22 energy balance method (EBM),23,24 and frequency–amplitude formula25–27 were presented to solve equation (1) for . Most of the above methods were developed based on trigonometric functions.
In 1986, Zhou28 first introduced a semi-analytical method named differential transform method (DTM) in which the solution is chosen as a truncated Maclaurin series and applied to analyze linear and nonlinear electric circuit problems. Then some authors applied the DTM29–34 to solve linear and nonlinear differential equations. But such truncated series solution does not nicely exhibit the periodic behavior which is characteristic of oscillator equations. It provides satisfactory results within a small region only. In order to improve the accuracy of the DTM, an alternative technique was used which modifies the series solution for nonlinear oscillatory systems. A modification of the DTM, based on the use of Padé approximants, was proposed by Shahed35 for solving different types of nonlinear problems. Further, Momani et al.,36 Nourazar et al.,37 and Benhammouda et al.38 modified the DTM by applying the Laplace–Padé resummation method. However, it is a laborious task.
Recently, Alam et al.39 presented an analytical technique for solving equation (1). But the method39 is useless for some nonlinear oscillators such as quadratic oscillator (in region ), cubical oscillator of softening springs (i.e., Duffing equation, , ), and pendulum equation. The aim of this article is to find suitable solutions for these situations. Moreover, the solution (concern of this article) provides desired results for a wide variety of nonlinear oscillators whether or not. Thus, the method also covers the cases of quadratic oscillator (in region ), cubical oscillator of hardening springs (Duffing equation, ), etc.
The method
By variable transformation, , equation (1) with initial conditions becomeswhere primes denote differentiation with respect to . In general, initial conditions are chosen as , but in Ref. 39, the former conditions were considered.
A polynomial type of solution of of equation (2) was found in a form39when . Solution equation (3) is also valid when . It is obvious that equation (3) satisfies the first initial condition given in equation (2). Usually, solution equation (3) is used for a semi-period of oscillation, . For the next semi-period, and are changed, respectively, by , , and . Substituting equation (3) into equation (2) and then equating coefficients of , a set of linear algebraic equations of are obtained whose solution provides the noted unknown coefficients. The value of has the maximum value (known as amplitude of oscillation, say ) at . Therefore, a relation between amplitude and frequency becomes
On the other hand, has the minimum value (say ) at . In this case, can be replaced by and by . Therefore, equation (4) is replaced bywhen , , and equation (4) and equation (5) are identical. So, . However, a problem arises when . In this case, and have different values. For this reason, and have different values. Usually is given and is determined. Therefore, an algebraic relation is required between and . Moreover, equation (4) contains two unknown and , and equation (5) contains and . Therefore, it requires another relation involving them.
Now multiplying both sides of equation (2) by and then integrating with respect to where when is a function of only and is an integration constant. It has already been mentioned that is the maximum at and minimum at . So, vanishes at these limits. On the other hand, as well as vanishes at and . At these limits, , respectively, becomes and . Thus, the following relations are obtained from equation (6).andComparing equation (7) and equation (8), the relation between and is obtained as
Finally, solving equation (4) and equation (7), and are obtained. In a similar way, and are obtained solving equation (5) and equation (8).
Examples
Duffing (cubical) oscillator
Let us consider the Duffing oscillator
Substituting solution equation (3) into equation (10) and then equating the coefficients of , , the following algebraic equations are derived:
Solving equation (11), the unknown coefficients are derived asNow, differentiating equation (3) with respect to and then substituting (i.e., by utilization of the second initial condition), it becomesNow, from equation (12) and equation (13), all unknown coefficients can be written in terms of asSubstituting these values of unknown coefficients (up to ) in equation (4), it becomesor
For this oscillator, equation (7) becomesand it can be written asBy substitution of in equation (16), it becomesWhen is given, the value of is obtained from equation (19) by an iterative procedure, starting with initial . Therefore, the solution of Duffing oscillator equation (10) is obtained from equation (3) by substituting the values of from equation (14).
Quadratic oscillator
Let us consider the quadratic oscillator
For this oscillator, unknown coefficients have been obtained:Substituting these values of unknown coefficients (up to ) in equation (4), it becomes
For this oscillator, equation (7) becomesand it can be written asBy substitution of in equation (22), it becomesWhen is given, the value of is obtained from equation (25) by an iterative procedure, starting with initial . For the next semi-period, corresponding equation (24) and equation (25) becomewhere .
When is given, the value of is obtained from equation (27) by an iterative procedure, starting with initial . Therefore, the solution of quadratic oscillator equation (20) is obtained from equation (3) by substituting the values of from equation (21).
Pendulum equation
Let us consider the pendulum equation
For this oscillator, unknown coefficients have been obtained:Substituting these values of unknown coefficients (up to ) in equation (4), it becomes
For this oscillator, equation (7) becomesand it can be written asBy substitution of in equation (30), it becomesWhen is given, the value of is obtained from equation (33) by an iterative procedure, starting with initial . Therefore, the solution of pendulum equation (28) is obtained from equation (3) by substituting the values of from equation (29).
Results and discussion
In this section, solutions for various nonlinear oscillators obtained by the present method are compared with corresponding numerical solutions (4th-order Runge–Kutta method). First of all, solutions of the Duffing oscillator for different initial conditions are presented in Figures 1–5. From these figures, it is clear that present solutions agree with corresponding numerical solutions whether or . It is noted that a solution of the Duffing equation exists for all values of when . On the contrary, a periodic solution of this oscillator is found for some particular values of when (e.g., when ).
Comparison of the solutions between the present method and the numerical method for the Duffing oscillator with the initial condition [] for and , where .
Comparison of the solutions between the present method and the numerical method for the Duffing oscillator with the initial condition [] for and , where .
Comparison of the solutions between the present method and the numerical method for the Duffing oscillator with the initial condition [] for and , where .
Comparison of the solutions between the present method and the numerical method for the Duffing oscillator with the initial condition [] for and , where .
Comparison of the solutions between the present method and the numerical method for the Duffing oscillator with the initial condition [] for and , where .
For the quadratic oscillator, the solutions agree with numerical solutions for different values of . In Figures 6 and 7, respectively, for and , the solutions are presented together with corresponding numerical solutions when .
Comparison of the solutions between the present method and the numerical method for the quadratic oscillator with the initial condition [] for and , where .
Comparison of the solutions between the present method and the numerical method for the quadratic oscillator with the initial condition [] for and , where
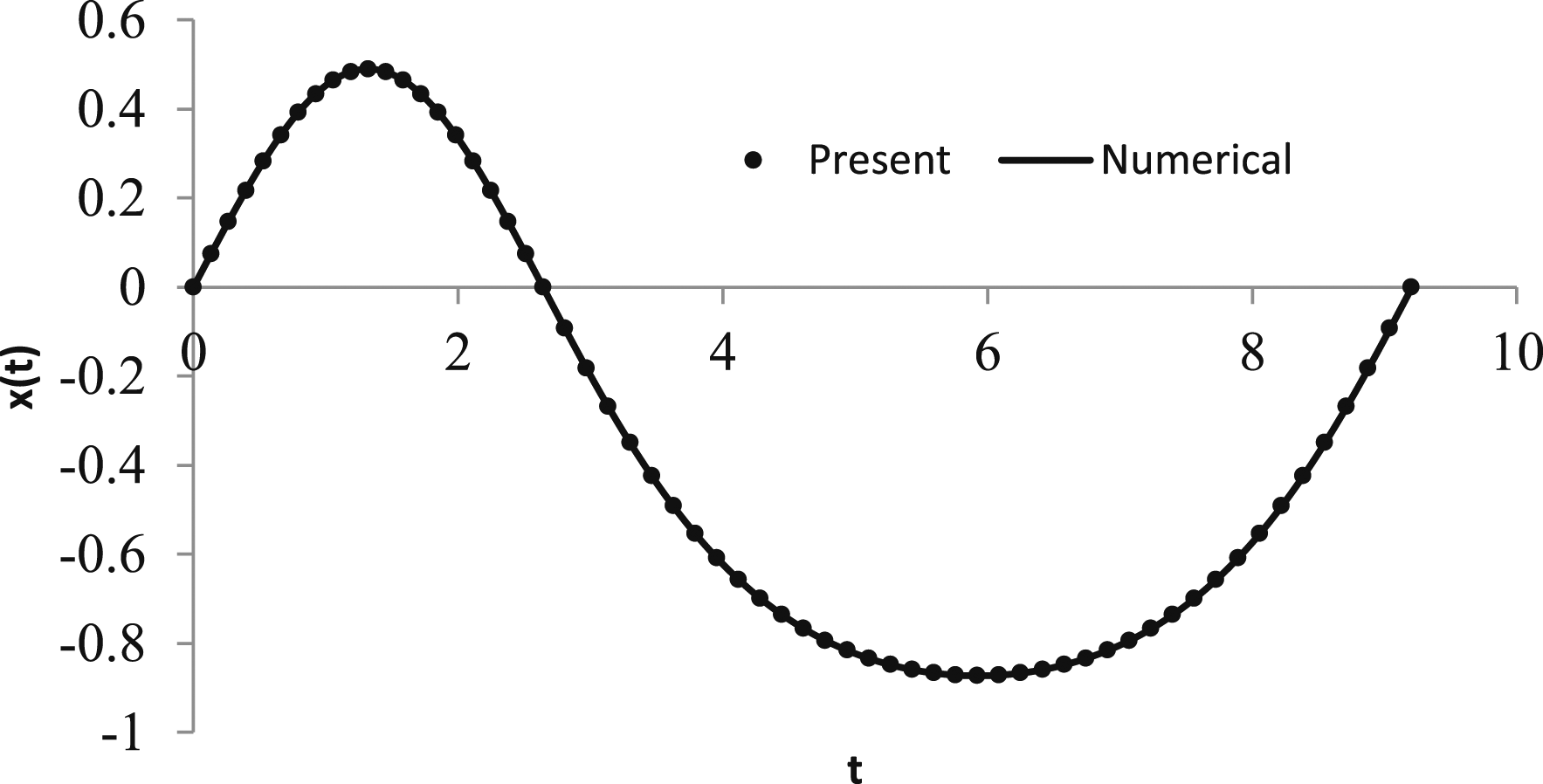
In Figures 8 and 9, for and , solutions of the pendulum equation are presented together with numerical solutions. The periodic solution of this oscillator is found for all values of . But it requires a lot of terms of when . On the other hand, it requires many harmonic terms to obtain a desired result by the homotopy perturbation method or VIM or harmonic balance method, etc., when .
Comparison of the solutions between the present method and the numerical method for the pendulum equation with the initial condition [] for .
Comparison of the solutions between the present method and the numerical method for the pendulum equation with the initial condition [] for
It is noted that the homotopy perturbation method, VIM, harmonic balance method, etc., are widely used tools for handling strong nonlinear oscillators. But every method has some limitations. The homotopy perturbation method provides good results for the Duffing oscillator; but it is useless for the quadratic oscillator when (Appendix B). The advantage of the present method is that it nicely covers both oscillators.
Conclusion
An approximation technique is presented for solving various strongly nonlinear oscillators. The determination of a solution is simpler than its original version. The trial solution is completely algebraic and the coefficients of unknown variables are determined by solving a set of simple linear equations. The method is similar to the DTM, but it is much easier.
Footnotes
Acknowledgements
The authors are grateful to the honorable reviewers for their constructive comments to improve the quality of this article. The authors are also grateful to the Associate Editor for his assistance to prepare the revised manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research,authorship,and/or publication of this article.
Funding
The author(s) received no financial support for the research,authorship,and/or publication of this article.
ORCID iD
M Kamrul Hasan
References
1.
NayfehAH. Perturbation method. New York: John Wiley & Sons, 1973.
2.
NayfehAHMookDT. Nonlinear oscillations. New York: John Wiley & Sons, 1979.
3.
KrylovNNBogolyubovNN. Introduction to nonlinear mechanics. Princeton, NJ: Princeton University, 1947.
4.
AlamMS. A unified Krylov-Bogoliubov-Mitropolskii method for solving nth order nonlinear systems. J Franklin Inst2002; 339: 239–248.
5.
AlamMSAbul Kalam AzadMAKHoqueMA. A general Struble's technique for solving an nth order weakly non-linear differential system with damping. Int J Non Lin Mech2006; 41: 905–918.
6.
CheungYKChenSHLauSL. A modified Lindstedt-Poincaré method for certain strongly non-linear oscillators. Int J Non Lin Mech1991; 26: 367–378.
7.
HeJH. Modified Lindstedt-Poincare methods for some strongly non-linear oscillations. Int J Non Lin Mech2002; 37: 309–314.
8.
AlamMSYeasminIAAhamedMS. Generalization of the modified Lindstedt-Poincare method for solving some strong nonlinear oscillators. Ain Shams Eng J2019; 10: 195-201.
9.
YeasminIARahmanMSAlamMS. The modified Lindstedt-Poincare method for solving quadratic nonlinear oscillators. J Low Freq Noise Vib Act Control2021; 40(3): 1351–1368.
BeléndezAHernándezABeléndezT, et al.Application of He’s homotopy perturbation method to conservative truly nonlinear oscillators. Chaos, Solit Fractals2008; 37: 770–780.
12.
BeléndezA. Homotopy perturbation method for a conservative force nonlinear oscillator. Comput Math Appl2009; 58: 2267-2273.
13.
AnjumNHeJH. Homotopy perturbation method for N/MEMS oscillators. Math Methods Appl Sci2020: 1–15. DOI: 10.1002/mma.6583
14.
AnjumNHeJH. Two modifications of the homotopy perturbation method for nonlinear oscillators. J Appl Comput Mech2020; 6: 1420–1425.
15.
HeJHJiaoMLHeCH. Homotopy perturbation method for fractal Duffing oscillator with arbitrary conditions. Fractals2022; 30(9). DOI: 10.1142/S0218348X22501651
16.
KhanYVazquez-LealHHernandez-MartinezL, et al.Variational iteration algorithm-II for solving linear and non-linear ODEs. Int J Phys Sci2012; 7(25): 3099–3102.
17.
AnjumNHeJHHeCH, et al.Variational iteration method for prediction of the pull-in instability condition of micro/nanoelectromechanical systems. Fizicheskaya Mezomekhanika2023; 26: 5–14.
18.
AnjumNRahmanJUHeJH, et al.An efficient analytical approach for the periodicity of nano/microelectromechanical systems’ oscillators. Math Probl Eng2022; 2022: 9712199. DOI: 10.1155/2022/9712199
19.
RehmanSHussainARahmanN, et al.Modified laplace based variational iteration method for the mechanical vibrations and its applications. Acta Mech Automatica2022; 16(2): 98–102.
LimCWWuBS. A new analytical approach to the Duffing-harmonic oscillator. Phys Lett2003; 311: 365–373.
22.
MehdipourIGanjiDDMozaffariM. Application of the energy balance method to nonlinear vibrating equations. Curr Appl Phys2010; 10(1): 104–112.
23.
YeasminIASharifNRahmanMRAlamMS. Analytic technique for solving the quadratic oscillator. Results Phys2020; 18: 103303.
24.
MollaMHUAlamMS. Higher accuracy analytical approximations to nonlinear oscillators with discontinuity by energy balance method. Results Phys2017; 7: 2104–2110.
25.
TianY. Frequency formula for a class of fractal vibration system. Reports in Mechanical Engineering2022; 3(1): 55–61.
26.
MaH. Simplified hamiltonian-based frequency-amplitude formulation for nonlinear vibration systems. Facta Univ – Ser Mech Eng2022; 20(2): 445–455.
27.
HeJHYangQHeCH, et al.Pull-down instability of the quadratic nonlinear oscillators. Facta Universitatis, series. Mech Eng2023; 21(2). DOI: 10.22190/FUME230114007H
28.
ZhouJK. Differential transformation and its applications for electrical circuits. China: Huazhong University Press, 1986. (in Chinese).
29.
ArikogluAOzkolI. Solution of fractional differential equations by using differential transform method. Chaos, Solit Fractals2007; 34(5): 1473–1481.
30.
DemirHSunguIC. Numerical solution of a class of nonlinear Emden-Fowler equations by using differential transform method. J Arts Sci Sayı2009; 12.
31.
MirzaeeF. Deferential transform method for solving linear and nonlinear systems of ordinary di;erential equations. Appl Math Sci2011; 5(70): 3465-3472.
32.
KenmogneF. Generalizing of differential transform method for solving nonlinear differential equations. J Appl Comput Math2015; 4(1): 01–05.
33.
MatteoDIAPirrottaA. Generalized differential transform method for nonlinear boundary value problem of fractional order. Commun Nonlinear Sci Numer Simul2015; 29(1-3): 88–101.
34.
OpanugaAAEdekiSOOkagbueandHI, et al.Numerical solution of two-point boundary value problems via differential transform method. Global J Pure Appl Math2015; 11(2): 801–806.
35.
ShahedME. Application of differential transform method to non-linear oscillatory systems. Commun Nonlinear Sci Numer Simul2008; 13: 1714–1720.
36.
MomaniSErturkVS. Solutions of non-linear oscillators by the modified differential transform method. Comput Math Appl2008; 55: 833–842.
37.
NourazarSMirzabeigyA. Approximate solutions of nonlinear Duffing oscillator with damping effect using modified differential transform method. Sci Iran B2013; 20(2): 364–368.
38.
BenhammoudaBLealHVMartinezLH. Modified differential transform method for solving the model of pollution for a system of lakes. Discrete Dynam Nat Soc2014: 12. 645726.
39.
AlamMSHuqMAHasanMK, et al.A new technique for solving a class of strongly nonlinear oscillatory equations. Chaos, Solit Fractals2021; 152: 111362.