
Abstract
Introduction
Recently, as more and more mobile devices are included in the wireless network, the demand for the volume of the access point and the system throughput has a rapid growth.1,2 By 2025, the total number of the wireless devices will surpass 75 billion, and the corresponding requirement of data is over 3.3 ZB.3,4 In order to meet the requirement of access capacity and system capacity, the Heterogeneous Cloud Radio Access Network (H-CRAN), combined with Device-to-Device (D2D) communication, is introduced into the 5G core network.
In traditional wireless network structure, to guarantee the seamless coverage, the high-power node integrated control and forwarding unit is utilized. However, it is difficult to fulfill the throughput and access point volume requirement at the hot area. Thus, in order to increase the capacity of the wireless access network effectively, the H-CRAN network is introduced, which adds centralized baseband processing unit (BBU) entities and distributed remote radio heads (RRHs) components while retaining the original high-power node.5–7 For meeting the massive data needs of users in hot areas, RRHs as signal forwarding relay are ultra-densely deployed. All BBU units with control plane are grouped together in a centralized location to form a BBU pool aggregating all resources within cloud computing.8–10 Then, BBU pool can not only realize large-scale radio resource allocation but also offer collaborative processing.11–13 BBU controls RRH through fronthaul link while BBU pool communication with traditional high-power node via backhaul links. By this way, the networking benefits are fully utilized without increasing the running cost and the energy consumption of network infrastructure.
D2D communication is defined as user equipments (UEs) in physical proximity that directly communicate with each other without passing through cellular infrastructures, which greatly reduce the burden of cellular infrastructure.14,15 To efficiently enhance spectral efficiency, in general, D2D communications are considered to utilize the same spectrum as cellular user (CU). Thus, D2D communications have the great potential advantage of high data rate, short delay, low power consumption, and increased network capacity for supporting popular proximity-based applications. 16
Combining D2D communication with H-CRAN provides larger network capacity and better user experience. Due to the limited spectrum resources of cellular networks, the user in high-density mutual communicating RRHs environment with a resource-reused manner as D2D communication, which will bring unpredictable inter-layer interference or co-layer interference.17,18 This kind of interference will not only affect the quality of service (QoS) of users but also lead to system performance degradation. Therefore, it is of great importance to make reasonable resource allocation.
Related works
To fully boost advantages brought by D2D and H-CRAN, lots of research efforts have been addressed by industry and academia. Based on stochastic geometry framework, Abana et al. 19 analyzed the improvement of performance in terms of coverage and average traffic delivery rate with non-uniform D2D deployment and uniform D2D deployment in H-CRAN. With the same way as Abana et al., 19 the spectral efficiency performance of system is integrated in Liu et al. 20 for D2D communications with downlink coordinated multipoint (CoMP) in C-RANs, whose mode selection scheme is depended on distance. However, Abana et al. 19 and Liu et al. 20 analyze the influence of D2D communication on the performance of H-CRAN network, but ignore the role of D2D performance itself.
Instead, an improved directed-hypergraph-based local altruistic game is proposed in Sun et al., 21 which is aiming to maximize D2D access rate and channel reuse rate as well as minimizing the uplink transmission power in multi-cell scenarios. But it only focuses on D2D’s own performance. Expecting to improve the spectrum efficient, the previous studies22–24 pay more attention on energy efficient. A resource allocation based on distributed non-cooperative game theory is investigated in Zhou et al. 22 Based on D2D in-band and out-band, a novel energy efficiency spectrum sharing mechanism is proposed in Li et al. 23 and Gui et al. 24 However, their optimized object is the edge user of H-CRAN network. All the above-mentioned works take two-layer hybrid network structure into account, while ignoring the overall system performance.
In order to achieve the maximal overall system throughput, the previous studies25,26 considered the downlink reuse scenarios and exploited a many-to-one matching channel allocation to optimize underlaying user access rates, where power allocation is forgotten. Different from above, a joint mode selection and channel allocation scheme are researched in Zhen and Sun 27 to maximize the system uplink throughput, by using game theory on distributed coalition formation. Based on Sun et al., 28 a distributed and staged resource allocation mechanism is proposed, which considered the mode selection, channel allocation, as well as the power control. Furthermore, a joint mode selection, user connection, and power allocation dynamic scheme are investigated in Mo et al., 29 which takes the time-varying of traffic and channel into account. However Sun et al. 28 and Mo et al. 29 still considered only D2D users, neglecting the performance improvement of other users.
From the above articles, it is obviously seen that fully utilizing the advantages of D2D communication could effectively improve the coverage, spectrum efficiency, power efficiency, throughput, and other performance of the H-CRAN network. However, most of the research are interested in enhancing the performance of underlaying network such as RRH users or D2D user. Only a few works concerned with the whole system situation. Some of the literature which optimizes global performance only show solicitude for channel allocation and abandons the role of power control. Therefore, a joint power allocation and channel selection scheme is quite essential.
Main contributions
In this article, to maximize overall H-CRAN throughput and guarantee the QoS requirements of each H-CRAN layer, jointly optimizing the performance of overall H-CRAN with power allocation and channel allocation is considered. This resource allocation is formulated into a nonlinear integer programming problem with constraints on maximum power, Signal to Interference plus Noise Ratio (SINR), and channel number. To deal with this optimization problem, a two-step optimization framework is utilized to decompose the original problem into two sub-problems. The main contributions are as follows.
A joint optimization resource allocation is proposed in this article, which not only focuses on the power allocation but also takes the channel allocation into account. To better adapt to the H-CRAN, a semi-centralized scheme is utilized, which is effectively suitable for the distinct processing characteristics of BBU pool.
Different from binary mapping model, the 3D mapping-based solid geometric programming and hypergraph is introduced. The solid geometric programming is used to map power and its constraints. The hypergraph is investigated to capture the complex multiple co-channel relationship.
Considering the complexity, the non-convex mixed integer programming original problem is decomposed into two sub-problems, the power allocation and channel allocation. Then, based on 3D mapping-based model, the Geometric Vertex Search approach and bipartite conflict graph are used to solve power and channel allocation problem.
The simulation results validate that the proposed algorithm has a significant gain over the others in terms of throughput and user access rate. Furthermore, the proposed algorithm is easier to implement based on BBU pool.
The contents of this article are as follows. In section “System model,” the system model and optimization problem are explained. In section “Problem decomposition and algorithm design,” the solid geometric programming and hypergraph matching model are proposed, correspondingly Geometric Vertex Search approach and 3D Matching Game are elaborated to search the optimal power allocation and channel allocation. Section “Numerical results” is numerical results of the proposed algorithm and the performance of system. The conclusion is revealed in section “Conclusion.”
System model
System model
As illustrated in Figure 1, an H-CRAN with D2D communication system contains
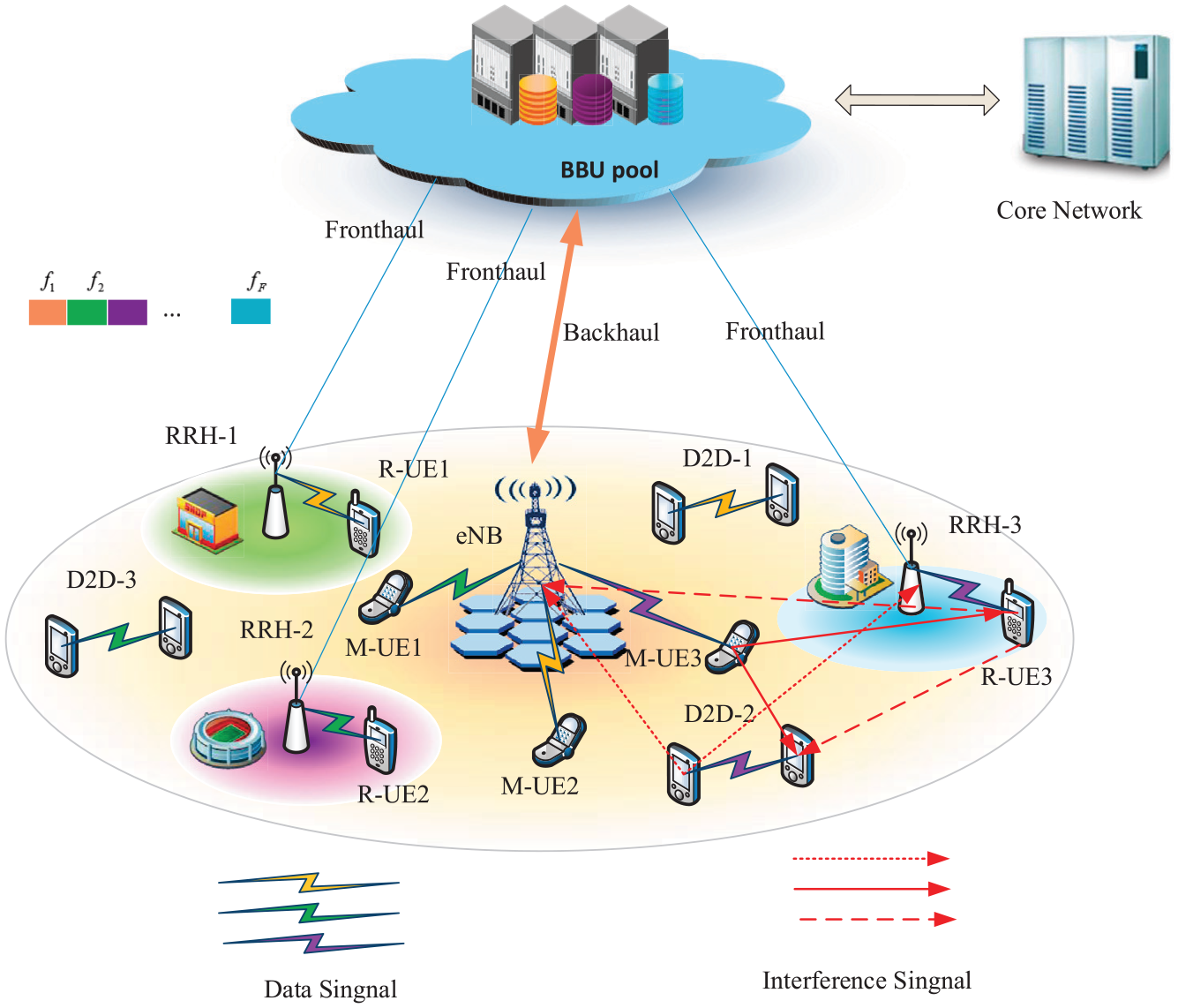
H-CRAN with D2D communication system model.
For simplicity, we divide the uplink resources into equal sized sub-channels and exploit
For macrocell, the link gain of the
Key system notation.

D2D: Device-to-Device; RRH: remote radio heads; SINR: Signal to Interference plus Noise Ratio.
Problem formulation
The binary variable



We assume that the


Let



According to Shannon’s theorem, the throughput of D2D pair



To maximize the sum rate of the system constraint by unique condition of each sub-channel, the maximum power, and the SINR of all users, the optimization is depicted as







where the
Problem decomposition and algorithm design
The optimization problem
Power allocation based on Geometric Vertex Search
In this section, the optimal power allocation scheme is addressed by Geometric Vertex Search method. In order to maximize the throughput of the D2D pair, the original problem is transformed to





By adopting solid geometric approach, the SINR constraints of the power maximum problem are transformed to equation constraints as follows



Considering equations (24)–(26), the power
It is proved that when the maximized sum rate is achieved, at least one of the powers reaches its maximum power. However, the sum rate expression in equation (19) is non-convex with respect to arbitrary combinations of varying powers. Consequently, for arbitrary number of transmitters, the optimal powers may not necessarily lie on the vertices of the power region, leading to a possibly infinite set of points to test. Since the objective function on the boundary and SINR constraint is a quasi convex function, their optimal solution has the same power. Then, the optimal power of throughput can be obtained by finding the optimal solutions of SINR, which lies on the corners or vertices of the power region as shown in Table 2.
Set of optimal power.

Channel allocation based on 3D matching problem
Based on the above results of power allocation, the sum throughput

The original problem


To address it, first
To facilitate understanding of the channel allocation scheme, some notations and definitions used are introduced as follows.30,31
Definition 1 (hypergraph)
Denote a non-empty set of all elements as
Definition 2 (k -uniform hypergraph)
Based on Definition 1, we know that each hyperedge
Definition 3 (bipartite conflict graph)
A bipartite conflict graph
Definition 4 (µ -claw)
In bipartite conflict graph
Based on the above definition, the channel allocation process is as follows:
As Figure 2(a) shows, we transform the original channel allocation problem into a 3D matching problem according to the assumption that each M-UE corresponds to channel one by one. Let
To simplify the original hypergraph, the hyperedges which do not satisfy equation (27) is removed. Thus, a feasible hypergraph
If each hyperedge in hypergraph is denoted as a vertex, such as the hyperedges (
Based on Definition 4, we know that for any center node

3D Hypergraph matching for channel allocation. It consists of three parts: (a) original hypergraph, (b) feasible hypergraph, and (c) conflict graph. In (a), each channel is shared by one M-UE, one R-UE, and one D2D pair, and each macro user corresponds to each channel one by one; the M-UE, R-UE, and D2D pair constitutes the original three-dimensional hypergraph. In (b), only the hyperedges in hypergraph that meet the constraints are preserved, others are deleted, and then the feasible hypergraph is formed. In (c), construct a conflict graph structure with the same vertex to hyperedge and
With the above knowledge, the proposed channel allocation scheme contains the following steps:
Construct Hypergraph based on
Find the Feasible Hypergraph from the original Hypergraph;
Construct a Bipartite Conflict Graph to map the feasible hypergraph;
Initialize the solution of the independent set by a heuristic greedy algorithm;
Search the
Update the result if a superior performance is achieved by any neighborhood.
The pseudo-code details are shown in the following Algorithm 1 and Algorithm 2. Note that the vertex number of


The procedure of proposed scheme
As Figure 3 illustrates, the detailed communication procedure of the proposed scheme is given. The channel state information (CSI) of all H-CRAN uplinks and D2D links by eNB and RRHs with fronthaul links, which is assumed following quasistatic block fading distribution, is perfectly acquired BBU pool node. Then, the BBU pool further performs baseband signal processing and resource allocation, which consists of three main stages. In Stage 1, the optimal transmit power is found by relaxing the constraints in equation (18), and correspondingly, the throughput matrix is obtained for each MUE, RUE, and D2D pair. In Stage 2, a weighted hypergraph model is constructed for sub-channel allocation problem. In Stage 3, the total achievable throughput system is obtained with the proposed algorithm. Finally, the calculation result is fed back to all the users through eNB and RRHs (Figure 4).

The feasible power regions of different cases. There are three cases: (a) The planes composed of three equations are orthogonal, and each plane intersects the maximum power edge of the cube. (b) Tilt a plane on the basis of the three planes shown in (a) to form a new feasible power regions. (c) Tilt two planes on the basis of the three planes shown in (a) to form a new feasible power region.

The procedure of the proposed resource allocation. There are three main steps: (1) information calculation, (2) power allocation, and (3) channel allocation.
Numerical results
In this section, we present the simulation results and their corresponding analysis. We consider three-tier H-CRAN with one eNB, some RRUs, and some D2D pairs. As shown in Figure 5, the macrocell is assumed with a radius of 1000 m. The RRUs with 200–300 m coverage distance located in the edge of the macrocell. The D2D pairs are randomly distributed in the coverage of the macrocell, and D2D communication range is within 20–60 m. Both M-UEs and R-UEs are correspondingly distributed within the coverage of eNB and RRUs, respectively. Specific simulation parameters and values are listed in Table 3.

The simulation scenario of three-tier H-CRAN.
Parameters of system.

RRH: remote radio heads; D2D: Device-to-Device; SINR: Signal to Interference Plus Noise Ratio.
To evaluate the performance, we compared the performance of our proposed algorithm with the iterative Kuhn and Munkres (IKM) algorithm in Liu et al., 34 which transforms the 3D matching problem into three iterative two-dimensional matching problems, and the greedy 3D matching algorithm (GDM) in Wang et al., 35 which arrange all the hyperedges in descending order on the basis of their weights and then obtain the sub-optimal solution in a greedy manner with low complexity. In the following simulation results, greedy iterative hypergraph matching (GIHM) is used to represent our proposed algorithm. They all are used to optimize the three-dimensional matching problem. We also evaluate the performance of the three schemes in terms of system throughput and the admitted rate with different parameter settings. All the results averaged over 200 random trials.
Figure 6 shows the total throughput at different D2D radius and RRH coverage radius. It is observed that the throughput gain decreases when the distance of the D2D pair or RRH-RUEs become farther apart. The reason is that the D2D link would be weaker with increasing separation distance of the D2D pair or the RRH-RUEs under constant transmit power. Moreover, it is seen that performance GDM is worst. The reason is that the GDM is based on the heuristic descending algorithm and searches an independent set of hyperedges with the highest weight. It ignores the effect of intersecting hyperedges on performance. The IKM outperforms GDM approaches, because it converts the 3D match into a 2D match and then solves it based on iterative algorithm, which can only guarantee the optimality of the 2D match while cannot guarantee the most positive of the three-dimensional match. The proposed scheme performs the best among other schemes, and this is because the scheme is modeled with hypergragh matching and solved by conflict graph based on greedy algorithm and multiple iterations. The near-optimal throughput is achieved as shown in Figure 2. When D2D distance is 20 m, the proposed algorithm can improve throughput performance by 6.25% and 30% as compared to other schemes.

Total throughput versus the distance of D2D pairs.
Figure 7 is presented to show that the proposed algorithm increases the throughput of the H-CRAN combined with D2D with different number of D2D pairs and R-UEs. Obviously, the total throughput is enhanced as the number of D2D pairs and R-UEs increase. As it was observed, the turning point of the number of D2D pairs is 18. The throughput growth rate is significant when the number of D2D in the system is smaller. However, the throughput curve rises slowly when the number of D2D in the system is larger than it. Since the

Total throughput versus the number of D2D pairs.
In Figure 8, the impact of the minimum SINR requirement on the users’ throughput performance is further evaluated. It is shown that the throughput increases slightly, when the minimum SINR of RUEs is less than 7. The reason is that the increase in the minimum SINR requirement of RUEs will bring larger transmit power of RUEs, which will inevitably increase throughput. When the minimum SINR of RUEs is less than 13 and more than 7, the throughput decreases significantly. This is because in order to meet the minimum SINR requirements of RUEs, the increasing power will bring too much interference to other users, which will reduce the user admitted rate. It is not difficult to see in Figure 11. In addition, the larger minimum QoS requirements of D2D pairs, the smaller total throughput, regardless of the matching algorithm are used. The reason is the similarity of increasing minimum QoS requirement of R-UEs. Once again, the performance of our proposed algorithms is better than the IKM and GDM algorithms.

Total throughput versus the SINR threshold of R-UEs.
Figure 9 investigates the performance of three schemes in terms of the number of admitted underlaying users with different D2D radius and RRH coverage radius. The result shows that the number of admitted underlaying users of all the schemes decreases as the D2D pairs and RRH-RUEs distance increase. However, with the increase in D2D distance, the decline rate is gradually slow, and the performance gap between algorithms also decreases. The reason is that a larger distance of D2D pairs or RRH-RUEs represents a weaker link, thus it is more likely that D2D or RRH-RUEs transmission can be accomplished without losing other constraint. When D2D distance is 20 m, the performance of the proposed algorithm increases about 3% and 21% as compared to other schemes.

Admitted rate versus the distance of D2D pairs.
From Figure 10, the performance of the schemes in terms of the number of admitted underlaying users is investigated for different number of D2D pairs and R-UEs. It is easy to find that the more D2D pairs or RUEs are there, the higher number of admitted underlaying users is, which is consistent with that shown in Figure 7, further verifying that underlaying communication can improve the system throughput. Besides, the number of admitted rate increases distinctly with the enhancement of the number of D2D pairs in small region. Since in small region, the number of D2D pairs’ constraint becomes the major factor that narrows the feasible region of the number of admitted underlaying users. While the number of D2D pairs increases gradually, the raise in the admitted rate tends to be gentle owing to the fact that the number of RUEs constrains the admitted rate increment.

Admitted rate versus the number of D2D pairs.
From Figure 11, the performance of the schemes in terms of the access number of underlaying users is investigated for different minimum SINR requirements of D2D pairs and R-UEs. It is easy to observe that when

Admitted rate versus the SINR threshold of R-UEs.
Conclusion
In this article, a joint optimization problem to maximize the system capacity of hybrid scenario of the H-CRAN and D2D communication is presented. By step-by-step scheme, the original NP hard problem is decomposed into two sub-problems, for example, the power allocation and the channel allocation. In the first problem, the 3D optimal power programming problem is solved by the sub-channel allocation based on Geometric Vertex Search. Then, with bipartite conflict graph and the