
Abstract
Introduction
Sounding rockets, which lack control systems, are simple structures, and their costs are relatively low. The altitude of the trajectory can be changed easily according to the launch mission.1,2 Sounding rockets can explore the circumstances of near-space and can also be used to perform scientific research in that special environment.3,4 As a consequence of being the only direct detection method for near-space from tens to hundreds of kilometers, sounding rockets are now widely used in near-space circumstance detection,5,6 microgravity experiments, 7 and the validation of new space technologies. 8
The NASA (National Aeronautics and Space Administration) Sounding Rockets Program has launched more than 40 sounding rockets for different purposes over the past 3 years, including geospace science, astrophysics, solar physics, and the improvement and validation of technologies. Through the work of the sounding rockets, great discoveries in galaxy formation have been found by the team of Dr Bock and Colleagues 9 and substructures in the solar corona and their impact on coronal heating by the team of Dr Cirtain and Colleagues. 10 These achievements reconfirm that a few minutes of suborbital flight by a sounding rocket can enable world-class scientific discoveries. The total number of launches by NASA in the last 10 years is 184. NASA now has 14 kinds of sounding rocket vehicles, and the apogee altitudes of the rockets range from 50 to more than 1600 km. 11
The European Space Agency has been using sounding rockets to conduct low-gravity experiments since 1982. There are now four kinds of sounding rockets that are offered for microgravity research: MiniTexus, Texus, Maser, and Maxus. 12 The German MiniTexus sounding rocket program utilizes a two-stage solid propellant vehicle, the apogee is 140 km, and approximately 3 min of microgravity can be provided. The German Texus program now uses the VSB-30 sounding rocket, which was developed by Germany and Brazil, and through some launch missions from Texus-42 to Texus-48, it can now provide up to 6 min of microgravity. The apogee is 260 km.13,14 The Maser sounding rocket program was initiated by Sweden, the rocket has similar characteristics to the Texus, with microgravity durations up to 6 min, and the apogee is 260 km. The Maxus sounding rocket program was initiated by an industrial joint venture formed by EADS-ST and the Swedish Space Corporation. The Maxus program offers 12–13 min of microgravity, and the apogee of the trajectory is 705 km.
There are now various software packages we can access to simulate the trajectories of rockets, including RockSim and OpenRocket, which only simulate rockets under nominal conditions, and the Cambridge Rocketry Simulator, which can fly rockets under a range of possible flight conditions to obtain confidence bounds on expected flight paths and landing locations. 15 However, there are no dynamic models that include all of the working processes of sounding rockets. In this article, we will introduce a high-precision dynamic model of a sounding rocket, which consists of motion on the launch rail, free flight, the drawing out and inflation of parachutes, and the steady descent of the sonde–parachute system. In addition, based on the dynamic model, a new method for compensating wind effects is discussed. Based on the work reported in this article, we can determine details of the entire flight process, complete missions more successfully, and safely recover payloads.
The rocket trajectory
Dynamics of the motion on the launch rail
Once the motor is ignited, a rocket moves on the launch rail. When the front directional button has exited the launch rail, the rocket rotates around the aft directional button. A rotational angle and rotational angular velocity, which are commonly called the sinking angle and sinking angle velocity, are therefore produced.
The length of the launch rail is

The motion on the launch rail.
Linear motion
When the rocket is moving in a straight line in the launch rail direction, the rocket is affected by gravity, thrust, and the friction forces between the rocket and the rail, and the equations of motion can be obtained by Newton’s equation of motion, as shown in equation (1)

In equation (1),
Rigid body plane motion
When the rocket is moving in a plane, the forward directional button moves past the launch rail, and gravity produces a torque causing the rocket to begin to rotate around the aft directional button. In addition, the thrust is not in the same direction as the launch rail, as affected by the torque, and the elevation angle of the rocket is now

In equation (2),
The free flight phase
Once the rocket has taken off from the launch rail, the rocket flies freely in air under the actions of thrust, gravity, and aerodynamic forces. The 6-DoF (six-degree-of-freedom) dynamic equations of the rocket are built using the quaternion method in a body-fixed coordinate system rotating about a series of axes in the order
A quaternion is a special set composed of four mutually dependent scalar parameters

Combine the equations of the centroid dynamics, dynamics moment equations of the centroid, centroid kinematics equations, and the kinematic equations around the centroid. Substituting the quaternions for the Euler angles, we can obtain the 6-DoF model of the rocket presented below




In addition, the geometry equation is given by equation (8)

In the equations above,
The multi-body dynamics of the parachute–sonde system
The deployment of the parachute
Usually, the main parachute in the pack is dragged out by the pilot chute, and the entire deployment process is the result of the relative motion between the pack and the pilot chute. Theoretically speaking, it is a variable mass system with two bodies.
In the ideal deployment process of the parachute, the cord and canopy are dragged out from the pack in an orderly fashion. We adopt the lines-first deployment method, for which the following assumptions are made: 16
When the deployment process begins, the pilot chute is fully open.
During the deployment process, the cord (and the canopy) has been dragged out and stays in a straight line.
The parachute is dragged out consecutively, which means the mass of the pack is reduced consecutively.
The cord (and canopy) that has been dragged out is tightened, pulled by the pilot chute, and the aerodynamic force is ignored.
The wake flow effect of the sonde is ignored.
In Figure 2, the mass of the parachute pack (including the cord and canopy) is


The parachute deployment process.
In addition, the two parts of the system meet the conditions of the force balance model. Introducing gravity, aerodynamic drag, and cord tension, from equation (8) we can obtain equation (10)

In equation (10),

The inflation process
In actual measurements, the inflation time is inversely proportional to the deployment velocity

In equation (12),
If we substitute the average velocity

where

During the inflation process, the relationship between the drag area of the parachute and time can be described in the experiential formula as shown below

In equation (15),
The steady descent
After the successful deployment and inflation processes, the sonde enters the steady descent stage. Aiming at analyzing the characteristic of the movement of the descent stage, a multi-body dynamic model of the parachute–sonde system will now be built. 17
As shown in Figure 3, the ground-fixed coordinates

The coordinates of the parachute–sonde system.
The velocity of the parachute–sonde system at joint point

In equation (16),



By introducing antisymmetric matrices about


We can then obtain the 9-DoF dynamic model of the parachute–sonde system, as expressed below

The wind compensation method for the rocket
Analysis of the separation condition
To confirm the separation condition, we first need to discuss the parachute deployment conditions in a high-altitude, low-density situation.
The separation and deployment at the prearranged altitude may result in a low dynamic pressure situation. If so, the canopy can be filled with air only when the drag force of the canopy exceeds the gravitational force of the entire parachute system. If that condition is satisfied, the parachute system can be in the deployment process and then begins to inflate, and the drag force is shown in equation (23)

In equation (23),
When the gravitational force of the entire parachute system

From equation (24), we can determine the minimum velocity

The combination method to compensate for the wind effect
Considering both the calculation time and computational accuracy, a compensation method combining wind weighting with the pattern search method is developed in this article.
Most sounding rocket trajectory calculations, at the simplest level, are performed using point-mass simulations and assume that a rocket heads instantly into the relative wind. Hoult 18 has made some corrections to the wind response of a 3-DoF point-mass simulation in an attempt to emulate a 6-DoF simulation. However, the 6-DoF simulation has a higher precision normally, so in this chapter, we will try to shorten the compensation time using a new wind compensation method.
When the actual wind data at the launch site are acquired, we first use improved wind weighting technology to preliminarily compensate the launch parameters. 19 In that technology, we use the whole ballistic wind to replace the actual wind. The whole ballistic wind is defined as a constant wind during the boost phase, which causes the height of a given dynamic pressure to be equal to the same height from the actual wind data. The whole ballistic wind can be calculated as in equation (26)

In the equation above,
The weighting factor is described as the effect of the wind on the elevation angle of the velocity at the altitude of the given dynamic pressure

In equation (27),
With the weighting factors we obtain from equation (27), we can determine a weighting factor curve, as shown in Figure 4.

The relationship between weighting factor and altitude.
From the curve in Figure 4, based on the actual wind profile, we can interpolate and calculate the ballistic wind using equation (26). According to the wind compensation of the rocket, the preliminary launching parameters can then be rapidly determined.
After the preliminary compensation, the deviation of the trajectory in the wind and the nominal trajectory can be confirmed within a certain range, and the pattern search method 20 is then used to make the result closer to the nominal trajectory.
The basic idea of the pattern search method, in a geometric sense, is to seek a valley with a smaller function value. After the iterative optimization, the parameters to be optimized will finally approach the minimal point along the valley. The optimization begins from the preliminary compensated parameter
For the exploration mission of the sounding rocket, to assure that the parachute can be deployed successfully, we chose the launching elevation angle as the optimization parameter. The altitude at the appointed dynamic pressure is

Simulation results
In the simulations, the length of the rocket was 3.15 m, the initial mass was 151 kg, and the mass at the burnout point was 70 kg. An outside view of the rocket and the thrust–time curve are presented in Figures 5 and 6, respectively. The rocket was launched at an elevation angle of 85° and an elevation of 1000 m.

The outside view of the rocket.

Thrust–time curve measured through ground test.
The nominal trajectory
Considering the same sounding rocket system, the simulation tests were performed using different elevation angles. Figure 7 shows the simulation results for an elevation angle of 85°. From the comparative analysis of the different simulation conditions, we determined that the sinking angle effect had different significances with different elevation angles, and we determined that smaller elevation angles can result in more evident sinking angles due to the component force of gravity vertical to the launch rail. When the rocket is moving on the launch rail, the component force, which is negatively correlated with the elevation angle, produces a sinking moment on the rocket.

Sinking angle and angular velocity for an elevation angle of 85°.
The free flight phase was then simulated for an elevation angle of 85°, as shown in Figure 8. From the figure, we can determine that the rocket can fly smoothly to a height of more than 70 km; the dynamic pressures at 64 and 67 km are 20 and 10 Pa, respectively. The deployment of the parachute can be successfully completed in a near-space environment detection mission. Considering the sinking angle and sinking angle velocity, through the trajectory simulation, we can determine that although the sinking angle and sinking angle velocity are tiny compared to the elevation angle, the sinking angle and sinking angle velocity can be ignored only for simulations using large elevation angles close to 90°.

The trajectory and dynamic pressure of the ascend phase.
Considering the mission of the rocket, the deployment of the parachute is very important. Assuming the separation velocity between rocket and sonde is

The distance between rocket and sonde after separation.
The characteristic parameters of the deployment under different conditions are listed in Table 1. From the table, we can determine that the minimum distance between the rocket and sonde increased with an increase in the deployment height and that inflation failure may result from increased times to deployment. Furthermore, as the dynamic pressure of the deployment increases, the deployment duration increases and the possibility of a rear-end collision also increases. The deployment condition should, therefore, be chosen with both sides considered.
Deployment situations under different conditions.

Results after wind compensation
Based on the analysis and simulation results above, we chose the height with a dynamic pressure of 10 Pa as the separation point to deploy the parachute. With the goal of completing the mission, detecting the near-space environment, the dynamic pressure of 10 Pa was enacted to be at an altitude of 66 km, and in equation (28),
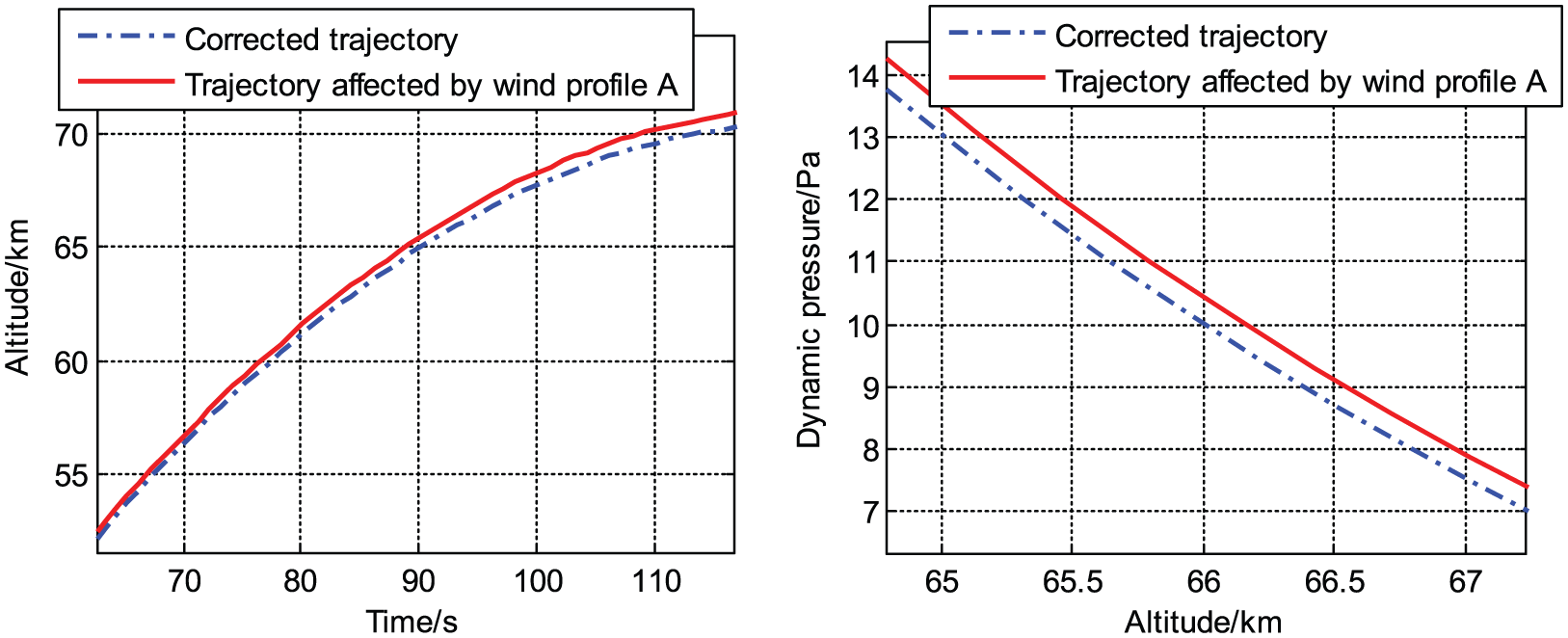
Wind compensation results for wind profile A.

Wind compensation results for wind profile B.

Wind compensation results for wind profile C.
In Figure 10, the trajectory affected by wind met the separation dynamic pressure at 66.158 km. After wind compensation, the altitude was 66.004 km, with an error of 4 m to the predetermined altitude, and the program ran for 2 min. In Figure 11, the trajectory affected by wind met the separation dynamic pressure at 66.585 km. After wind compensation, the altitude was 65.989 km, with an error of 11 m to the predetermined altitude, and the program ran for 3 min. In Figure 12, after compensation, the altitude changed from 66.464 to 65.995 km, and the program ran for almost 3 min. All the simulations were performed on a personal computer with an Intel Core i5 processor and random access memory of 4 GB, which is common in most computers. From the simulation times, we determined that the wind compensation method is suitable for calculating launch parameters immediately prior to launch. Due to the use of wind weighting, we can obtain approximate ranges of the launch parameters, which shorten the wind compensation time significantly, and the pattern search method is used to obtain precise solutions. Through the simulations, we determined that the errors were almost within 10 m.
With the simulations above, the wind compensation method has been verified to be rapid and precise.
Conclusion
This article has mainly analyzed the whole process dynamics of a sounding rocket, including motion on the launch rail, free flight phase, deployment of the parachute, inflation process, and steady descent. A high-precision dynamic model of a sounding rocket was built. The motions in each phase were investigated to study the entire trajectory of sounding rocket and sonde. Based on the dynamic model, a combination wind compensation method based on a 6-DoF dynamic model was presented to minimize the effects of wind and obtain the launch parameters, thus decreasing errors to almost 10 m.
Through the analysis, we studied the effects of sinking angle and sinking angle velocity on the trajectory. The lines-first deployment method and the inflation time method were used to study the deployment and inflation processes, and the relationships between deployment condition, deployment time, and the minimum distance between the rocket thrust stage and payload were obtained. Using the two-body dynamic model, the relative motion of the parachute–sonde system in the steady descent phase can be researched to further consider, for example, spin control. The wind compensation method combines wind weighting with the pattern search method, considering both efficiency and accuracy. The method was verified to be effective in this article.