
Abstract
Keywords
Introduction
Although subway systems are considered to be energy-efficient compared with other transportation, for example, private cars or buses, their energy consumption is very high. The studies on railway energy conservation have attracted many interests. 1 Around 40% of the total energy consumed in a subway system is consumed by train traction systems.2–4 Therefore, many researchers are devoting themselves to reduce the traction energy consumption from the substations. Benefit from the development and deployment of regenerative braking systems, trains’ kinetic energy can be converted to electrical energy during braking phases. 4 The electrical energy recovered from braking trains is called regenerative energy (RE). It can go back to power supply line, thus it can be utilized by accelerating trains and/or other electric equipment (e.g. air conditioners, lighting facilities) to reduce energy consumption in the same substation. As the energy demands of the other electric equipment are relatively small, there are two ways to utilize RE in general. One is to accelerate trains in the same substation immediately, and the other one is to store it in energy storage devices (e.g. super-capacitors) for later use. Since energy storage devices usually cost high and have limited capacities, 5 maximizing regenerative energy utilization (REU) through the synchronization of traction and braking trains is definitely a preferential way.2,6 Note that if RE is not utilized sufficiently and immediately, its surplus would be wasted by resistors into heat. The coordination of traction and braking trains can be fulfilled by slightly adjusting the timetable used in a subway system. It costs little and the impacts to the quality of subway service are limited. This explains why the studies on maximizing REU through timetable optimization have attracted great attention in recent years.7–13 The objective is to make the braking and traction of different trains occur simultaneously such that RE can be optimally utilized in a subway system.
Nag and Pal 14 first present a timetable model with the consideration of RE. Ramos et al. 7 present a mixed integer optimization problem for timetabling during off-peak hours, they take the overlap time of the traction and braking phases of the trains at the same substation as the measurement of REU, and solved the problem using a CPLEX software. Nasri et al. 8 use a simulation method to study REU, and the impacts of headway time between trains and reserve time at stations on REU are studied. Kim et al. 9 optimize the departure time of trains at the starting station to maximize REU. A multi-criteria mixed integer programming (MIP) method is used in their work. Fournier et al. 11 develop an optimization model to maximize REU by subtly modifying the dwell time for trains at stations. A hybrid genetic/linear programming algorithm is implemented to solve their problem. Li and Lo 15 present an integrated energy-efficient operation model to jointly optimize the timetable and speed profiles at sections. A genetic algorithm (GA) is designed to solve their problem.
Yang et al. 12 present a cooperative scheduling model to coordinate the traction and braking phases of successive trains in the same operation direction. They assume that RE from braking trains can only be utilized by its adjacent traction trains in the same direction. GA is designed to solve their problem. Both headway time and dwell time are optimized in their work. Yang et al. 13 present a two-objective timetable optimization model to maximize REU and reduce passenger waiting time concurrently. Their model coordinates the traction and braking phases of trains in the opposite directions at the same station, that is, one train is departing from a platform, while the other train is arriving at the opposite platform at the same station. GA is designed to solve their problem with the decision variables as the headway and dwell time. Their work lay solid foundations for the timetable optimization models of maximizing REU. However, several improvements can be made from their work. For example, the surplus RE not utilized by the adjacent trains is wasted in their model, rather than being utilized by other traction trains in the same substation, which disaccords with the facts of REU. In addition, the headway time between any two successive trains is assumed to be identical and got decreased in the experiments. However, shortened headway time leads to either shortened operation time or increased number of train trips. Both of them are not desired in a subway system in fact.
Motivated by the previous studies, we propose a timetable optimization problem to maximize REU for a subway system with more realistic considerations. RE generated from braking trains is utilized by all traction trains in the same substation, and the constraint that the operation time should be constant is considered in this work, under the assumption that the number of train trips is fixed. To make the problem solvable, headway time between different successive train pairs are not required to be identical. We formulate a mathematical model of the timetable optimization problem and then design an improved artificial bee colony (IABC) algorithm to solve the problem. The main procedures of IABC are presented, and the generation/update of a solution is designed according to the characteristics of the problem. Numerical studies based on the operation data from a subway line in China are conducted to illustrate the correctness of the mathematical model and the effectiveness of IABC. In addition, IABC is also compared with and performs better than GA.
The rest of the article is organized as follows. We present the timetable optimization problem and its mathematical model in section “Timetable optimization mathematical model.” Section “IABC algorithm” introduces the principle of the proposed IABC. We present the experimental studies in section “Experimental results and analysis” and conclude this article in section “Conclusion.”
Timetable optimization mathematical model
For a better understanding of this article, the parameters and variables used are introduced first.
Parameters and variables
Decision variables
Problem statement
As shown in Figure 1, a subway line comprised
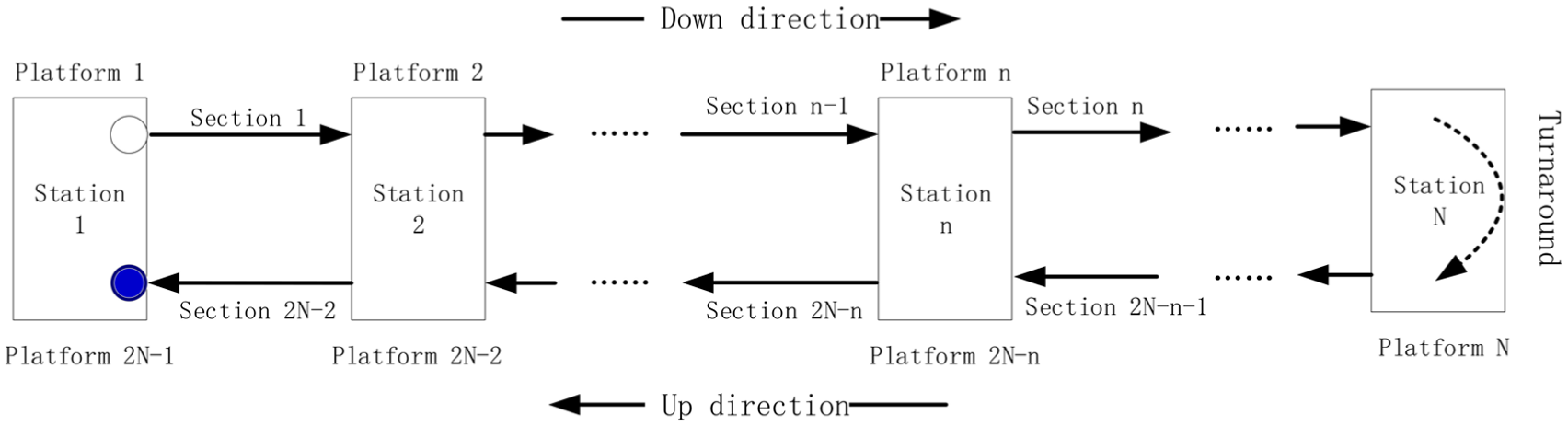
Train trip process.
Every train travels at the same path, but with a time interval between any two successive trains. The time interval between trains

General process of a train running at an inter-section.
For any train

where

For any train

Operation time duration of a subway system is represented by the time difference between the time instant that the first train starts its trip and that the last train starts its trip in this work, that is,

Trip time duration of a train is determined by its dwell time at platforms, running time at sections and the turnaround time. It can be described as follows

where
The train speed is 0 when a train stops at a platform, and it can be calculated according to the kinematics equation when the train is running at sections. Thus, the speed profile of a train is as follows

where
RE has to be utilized immediately by other trains in their traction phases; otherwise, it will be wasted into heat. So REU should be realized by coordinating traction and braking trains in the same substation. It is hard to know exactly how RE will spread throughout the power supply line and other trains. 11 The RE generated from braking trains can be shared by the traction trains in the same substation in our model. REU for each train is determined by the total amount of its traction energy demands and the amount of the RE available in this substation, that is, the RE transmission lost is assumed to be a constant. Figure 3 illustrates a case of four trains in a substation. The black arrows denote the direction of the electricity current. The sum of RE from the two braking trains is consumed by the other two traction trains together.

Flow chart of electrical energy.
The required electrical energy for accelerating train

The required electrical power

where
The total electrical power required to accelerate trains at substation

Similarly, the available RE from train


where

REU at the

Thus, total REU in a subway system is determined as follows

Mathematical model
The objective of our model is to maximize the total REU in a subway system. The decision variables are headway time and dwell time. The constraints include the safety, cost, and service quality of a subway system. The timetable optimization model is shown as follows, where

s.t.






Objective (equation (15)) aims to maximize the total REU in a subway system. Constraint (equation (16)) guarantees that the headway time between any two successive trains is within a predefined time window, where
IABC algorithm
Artificial bee colony (ABC) algorithm is a swarm intelligence algorithm. It was first proposed by Karaboga 17 in 2005. Since then, it has been successfully used to handle many complicated optimization problems.18–22 Its performance has been proven to be better than or similar to other intelligent algorithms, including differential evolution (DE),23,24 GA,19,25,26 particle swarm optimization (PSO),27,28 and evolutionary algorithm (EA).29,30,31 ABC can be efficiently employed to solve engineering problems with high dimensionality.32,33
Motivated by the previous studies, we design an IABC algorithm to solve our timetable optimization problem. Its main improvements over the prior ABC algorithms17,32,33 are as follows. First, a restart mechanism is introduced when the algorithm reaches a local optimum and thus enhances its global search ability. Also, the best solution found in each iteration is kept as one solution in the next iteration to avoid the results getting worse. Second, the current timetable is initialized as one solution, and specific random generation processes are specially designed for the initialization of other solutions. The processes are also used by each scout bee to make the generated solutions feasible, that is, satisfying constraints (16)–(21). Finally, for each employed bee and looker bee, a local search operator is randomly chosen from the swap, insertion, crossover, and mutation operators with the probability of
The main tasks of IABC include encoding of solutions, initialization of solutions, and the optimization with employed bee phase, onlooker bee phase, and scout bee phase, respectively.
Encoding of solutions
Encoding of a solution directly affects the complexity of the programming and the efficiency of IABC. Note that a food source represents a solution to the optimization model in IABC. According to the characteristics of our timetable optimization problem, we encode each solution as a vector of the decision variables, that is,
The main procedure of IABC is shown in Algorithm 1.

Initialization of solutions
At the beginning of IABC, we initialize

Optimization with employed bee phase
In each iteration, all the solutions are evaluated and a list that contains the

Principle of swap operator in IABC.

Principle of insertion operator in IABC.

Principle of mutation operator in IABC.

Principle of crossover operator in IABC.
The principle of swap operator is illustrated in Figure 4. Two positions
The principle of insertion operator is shown in Figure 5. Two positions
The principle of mutation operator is shown in Figure 6. A position
The principle of crossover operator is shown in Figure 7. The crossover operator is applied on two basic units with the same meaning in two solutions, for example, two headway time vectors
Optimization with onlooker bee phase
The process of onlooker bee phase is similar to that of the employed bee phase, except that each onlooker bee is assigned to a solution in the
Let
Calculate
Randomly generate a number
Compare
For each onlooker bee, once a food source is chosen, a local search operator is chosen and it is applied on this solution to generate a new one. The processes to choose an operator and to apply it are the same with that of the employed bee phase mentioned above.
Optimization with scout bee phase
To avoid IABC from being trapped in a local optimum, each scout bee randomly generates a new solution in each iteration. The random generation of a new solution is the same with that introduced in the initialization of solutions, which is shown in Algorithm 2.
Experimental results and analysis
To illustrate the correctness of the mathematical model and the effectiveness of the proposed IABC, several numerical experiments are conducted based on the data obtained from Yanfang Line, a subway line in Beijing, China. The running time at each section is given in Table 1, the sections in each substation are given in Table 2, and the other parameters of Yanfang Line are given in Table 3.
Actual running time at each section.

Sections in each substation.

Parameters for the Beijing Yanfang Line.

The parameters of IABC in the experiments are shown in Table 4. To compare IABC and GA,12,13,16 we keep the number of solutions searched nearly equal for the two algorithms. Thus, the population size of GA is set to be 50 and its maximum iteration count is 200. The local search operators used in GA include selection, crossover, and mutation. Their detailed processes can be found in the work by Yang et al. 16
Parameters of IABC.

IABC: improved artificial bee colony.
The timetable optimization problem is solved by IABC and GA, respectively. We compare their results with different train trip numbers (i.e. different values for
Performance indicators to evaluate the effectiveness of IABC
In order to evaluate the effectiveness of IABC in solving our timetable optimization problem, we apply it and GA, respectively, and obtain the optimized REU with different train trip numbers. The following performance indicators are used to analyze the experimental results and evaluate the effectiveness of IABC in the following sections:
Experimental results analysis
The experimental results are shown in Table 5.
Optimized REU by IABC and GA.

GA: genetic algorithm; IABC: improved artificial bee colony; REU: regenerative energy utilization.
I: train trip number; REU
It is clear that REU improves dramatically after optimization, and IABC performs better than GA in solving our timetable optimization problem.
To compare the effectiveness of IABC and GA intuitively, Figure 8 shows the optimization process with

Optimization process of IABC versus GA.
The near-optimal solution obtained by applying IABC when the number of train trips is 131 is shown in Figure 9 as an example. There are two subfigures in Figure 9. To see the changes of the optimized timetable with the current one clearly, the upper part of Figure 9 shows the differences between the optimized headway time and the headway time in the current timetable, and the lower part shows the optimized dwell time and that in the current timetable, respectively.

Optimal solution obtained by IABC.
From Figure 9 and Table 5, it is clear that by slightly adjusting the headway time and dwell time in a subway system, REU can be dramatically improved. This represents tremendous cost saving for the subway operators, and significant contribution to the environment, at the expense of very little impact on the service quality of the subway system.
Total money saving from the electrical energy by the optimized timetable for a subway system is determined as equation (22)

where
From above, we can see that this work is very useful for the decision makers to improve the timetable in a subway system on energy saving. Based on the proposed mathematical model and IABC, we can easily obtain an optimized timetable and thus save a great amount of money by maximizing REU in a subway system.
Conclusion
In this work, we propose a timetable optimization problem to maximize REU in a subway system, and its mathematical model is formulated with the decision variables of headway time and dwell time. RE generated from braking trains can be utilized by all traction trains in the same substation in the model. Some required constrains are considered, for example, the constant operation time constraint with fixed number of train trips in a day. Then, IABC is designed to solve our problem. A restart mechanism is adopted to reduce its chance of being trapped in a local optimum. The procedure that generates a new solution is specially designed to make every new solution feasible, including the random generation of a solution and the repair of a solution after a local search operator has been applied. Numerical experiments are conducted based on the data from a subway line in China. Experiment results prove the correctness of the model and the effectiveness of IABC in solving timetable optimization problems. IABC is also compared with and performs better than GA in the experiments.