
Abstract
Introduction
Autonomous ground vehicles (AGVs) are sophisticated robotic systems engineered to navigate and operate on land without human intervention. These vehicles employ a synergy of advanced sensors, artificial intelligence, and control algorithms to execute diverse tasks, spanning logistics, agriculture, defense, and manufacturing. Path planning is one of the most relevant problems to solve in AGV proper operation. The mission can fail if the path design is not correct or if its geometry is too hard to follow, leading to collisions that damage equipment or waste energy. In the literature, there are numerous allusions to the topic.1–6
In order to track paths without involving time constraints, route design must consider two fundamental objectives. The first is obstacle avoidance; this objective is directly related to machine safety and physical integrity. The second objective is path length minimization. Planning problem, this way, can be treated as an optimization process.
Numerous methods have been used to solve this problem, among which metaheuristics stand out.7–9 These approaches offer a distinctive perspective by treating planning as a search problem, aiming to identify, within a broad space of possible solutions, the one that optimizes certain parameters. To achieve the optimal solution, metaheuristic methods utilize diversification and intensification strategies in the search space. Diversification involves quickly exploring areas not yet considered. Intensification focuses on refining solutions to increase their quality. The method’s performance relies heavily on its ability to balance these strategies, 10 achieved through the careful selection of algorithm operators.
Sometimes, these methods can have computational drawbacks, such as too many control parameters, premature convergence, and high execution time.11,12 However, they can favor a correct controller design, avoiding exhaustive calculations and providing advantages such as robustness, extensive global search capacity, and parallel search. 13
Most projects in scientific literature assess algorithms along paths with predetermined characteristics or vary their parameters within the same type of terrain. However, the objective of this article is to compare various methods across environments of varying complexity to determine situations in which their usage is preferable.
This article presents the foundations of two of the most widely used metaheuristic methods in the literature: harmony search (HS)2,10 and ant colony optimization (ACO),13,14 within the context of path planning for AGVs. Overall, these methods embody contrasting approaches to their search strategies. HS is characterized by its ability to explore the solution space through harmonic modulation, where each iteration builds upon harmonizing previous solutions. This method tends to favor intensification, focusing on promising regions within the search space. In contrast, ACO employs stochasticity extensively, actively promoting diversification through the incorporation of probabilistic elements. Additionally, these methods can be adapted to improve their search capabilities. The resulting methods are known as enhanced harmony search (ENHS) and improved ACO (IACO). Their performance in path planning for routes composed of straight segments is evaluated based on simulated experiments conducted in various environments.
The article is structured as follows: The “Environment modeling” section outlines the model of the terrestrial environment used for implementing the route generation methods. The “Harmony search” and “Ant colony optimization” sections present the theoretical foundations of HS and ENHS, and ACO and IACO, respectively. The “Path correction” section discusses additional correction techniques applicable to paths formed by straight line segments. The “Results” section details the nature and results of the simulated experiments, subject to statistical examination in the “Discussion” section. The “Conclusion” section summarizes the conclusions drawn from the study. Finally, the “Future work” section provides the proposed guidelines to further expand the presented investigation.
Environment modeling
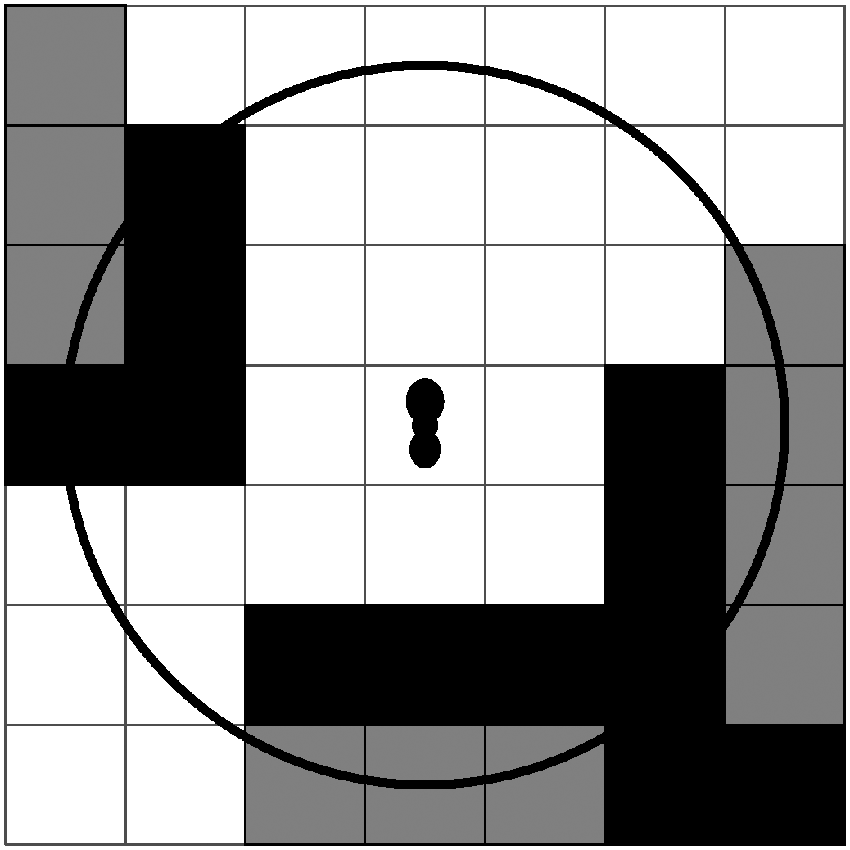
As a first step to comparing the performance of metaheuristic methods, finding a rule to determine the environment modeling and complexity is necessary. Path planning is implemented from an environment overhead image. Based on the grid method, 15 the image is represented as a bidimensional map, in which the path is a finite set of connected cells. Cells with a null value represent accessible areas, while cells with a unit value represent block areas, as illustrated in Figure 1. The number of obstacles to avoid and their distribution on the ground determine the environment’s complexity: a terrain that forces the vehicle to execute a more significant number of actions to avoid obstacles is more complex to navigate.

Environment model.
The possible paths are expressed using vectors to contain their node’s coordinates relative to the environment model obtained.
The following sections describe the theory implemented in each selected metaheuristic method.
Harmony search
HS algorithm is a heuristic search method that mimics the natural musical improvisation process. 16 In musical improvisation, each musician plays at any pitch within the possible range. If pitches are in good harmony, the experience is stored in the musician’s memory and the possibility of improving the composition increases. Similarly, in the HS model, each candidate solution is considered a “harmony.” The algorithm generates a new harmony in each iteration and submits it for evaluation. If the new harmony is good enough, the memory is updated to include it.
The algorithm starts by initializing a harmony memory vector (
Coordinate stored in
In addition, an evaluation criterion for harmonies is established. Similar to the aesthetic standard that the audience expects, in engineering terms, this criterion is calculated through a fitness function that satisfies the optimization goals. The proposed fitness function is shown in the following equation:
From this moment on, an iterative improvisation process is carried out. In each iteration, a new harmony
Memory consideration or randomization. Pitch adjustment.

Finally, if the newly generated harmony is better than the worst harmony stored in memory, in terms of fitness value, the worst harmony is replaced by the new one.
The algorithm continues to improvise new harmonies until a solution with a suitable fitness value is found. A maximum number of allowed improvisations (
Enhanced HS
HS is a highly versatile algorithm that is compatible with other optimization techniques, so it is usual to find numerous adaptations of HS in the literature to improve its convergence properties. Three modifications are proposed in this article:

Dynamically assigned parameters: (a) dynamic
Global-best PSO search. Neighborhood search.
Global-best PSO search is inspired by the concepts of particle swarm optimization (
The new improvisation process begins in the same way as the original HS: memory consideration and pitch adjustment operations remain unchanged. Instead, if condition 
The proposed HS algorithm adapted according to the above operations is called enhanced harmony search (
Ant colony optimization
ACO algorithm is a heuristic search technique that belongs to the swarm intelligence family. It was developed based on the foraging behavior of ants in nature.20,21
While exploring in search of food, ants deposit pheromones, simultaneously sniffs the environment and corrects their movement to directions with a high pheromone concentration. The ants that choose the shortest path reach the food and return to the nest quickly, so the number of ants that travel through this path is more significant, as also the deposited pheromones. As this substance volatilizes over time, the process eventually excludes the longest routes and produces trails of ants that take the shortest path. Similarly, ACO generates artificial ants and moves them from the vehicle’s position to the desired position, cell by cell, while avoiding obstacles. These ants modify a map of artificial pheromones as they pass. After several iterations, the pheromones distribution on the map makes all the ants converge to the same, shorter path.
Each ant has eight directions maximum in which it can move, corresponding to its neighbor cells, as shown in Figure 3. These directions are allowed as long as the movement on them does not generate collisions.

Possible directions of motion.
In the iteration 
After the entire colony completes its runs, pheromone levels volatilize and new deposits are added. The pheromone update is performed according to the following equation:
The algorithm stops after
Improved ACO
ACO is characterized by numerous complex mathematical operations that negatively impact its performance, and this is particularly true when the dimensions of the environmental model are large to include significant details. For this reason, various modifications to this algorithm can be found, focused on simplifying such operations. This article proposes the modifications explained below.
Visual range and visual field.
Following the allowed movement directions, the ant can move to any cell in its visual field.
With a free step length inclusion, ants gain a broader environment sense. A maximum movement simultaneously minimizes the distance to the destination point should be preferred. Therefore,
The inclusion of the free step length enhances the convergence capabilities and speed of the algorithm. Each ant step is determined by visibility and probability calculations, where the number of possible steps significantly influences the required processing and execution time. A broad visual range dramatically decreases the number of steps, reducing the chance of selecting inappropriate routes. However, by limiting candidate cells to the eight movement directions, there is a drawback of potentially overlooking promising routes.
The proposed ACO algorithm, adapted as described, is called improved ant colony optimization (IACO).
Path correction
Finding correct paths based on exploring a solutions space instead of deterministic rules can significantly reduce effort, especially when that rules incorporate complex mathematical developments. However, the search methods imply that solutions can be improved in some cases, especially in ample search space. For paths made up of straight line segments, it is possible to devise some correction schemes, such as removing redundant nodes. 15 This procedure considers the possibility that the route length can be shortened by connecting two nodes with an obstacle-free line of sight between them. Intermediate nodes are removed.
Results
To check the algorithms strength in path planning, simulated experiments are accomplished in the Matlab software tool. The selected variables to evaluate the performance are the total execution time until a suitable path is reached and the path length value.
The generation methods were executed 500 times in three distinct environments to mitigate randomness in the data. The original methods are also included in the simulation for the purpose of comparing their statistics with those of the improved versions.
The environments differ in obstacles number and the distributions they have:
Environment 1. This environment is the least complex of the three used. It has only one obstacle. Environment 2. This environment presents a moderate complexity. It has five obstacles with regular shapes. Environment 3. In this environment, the number of obstacles and their geometric complexity increase. It presents eight obstacles with various shapes.
Each named environment is modeled as a map of
The initial calibration of the design parameters is done according to the guidelines established in the bibliography.23,24 From there, it is adjusted by empirical procedures. Table 1 shows the selected parameters. Regarding the dynamic parameters of ENHS, the table presents the boundaries within which the algorithm operates, guided by the rules illustrated in Figure 2.
Algorithm parameters chosen for the simulated experiments.

Env.: environment; HS: harmony search; ENHS: enhanced harmony search; HMS: harmony memory size; NHMS: new harmony memory size; HMCR: harmony memory consideration rate; PAR: pitch adjustment rate; BW: bandwidth; ACO: ant colony optimization; IACO: improved ant colony optimization; GBR: global search rate.
Table 2 summarizes the fundamental statistics related to path lengths, providing a detailed overview of the distribution and variability of the results. The statistical measures encompass the minimum (
Statistical results derived from the simulated experiments.

Env.: environment; HS: harmony search; ENHS: enhanced harmony search; ACO: ant colony optimization; IACO: improved ant colony optimization.
Figure 5 shows the best path generated by ENHS and IACO in the three scenarios discussed.

Generated paths: (a) ENHS—Environment 1; (b) ENHS—Environment 2; (c) ENHS—Environment 3; (d) IACO—Environment 1; (e) IACO—Environment 2; and (f) IACO—Environment 3. ENHS: enhanced harmony search; IACO: improved ant colony optimization.
Discussion
Firstly, examine the compelling evidence indicating the enhanced performance of the modified algorithms compared to their original counterparts. Table 2 showcases time statistics for HS and ACO, marked in bold style, revealing values exceeding fourfold those observed in ENHS and IACO, respectively. Excessively high processing times are disadvantageous when selecting a candidate algorithm for implementation in the AGV’s path planning module because it can impact the response of subsequent navigation and tracking systems. The benefits of improvements are consistently evident in ACO across diverse scenarios. In the context of HS, the impact of enhancements becomes particularly notable in the high-complexity scenario.
According to the optimal length results shown in Table 2, the two algorithms have the goodness of correctly minimizing the distance if a sufficiently large iterations number is allowed. In terms of execution time performance, both methods exhibit statistics within ranges relatively similar to projects documented in the literature, even when employing different approaches (no metaheuristics) in path planning. This observation is supported by the data presented in Table 3, which compares the results obtained in this study with several projects reported in the specialized literature, developed in environments of similar complexity. Projects that use models of scenarios equivalent to those used in this article have been selected, thus ensuring the validity and relevance of the comparison made.
Comparison of execution time results with other projects collected in the literature. Unit of measurement: seconds.

ENHS: enhanced harmony search; IACO: improved ant colony optimization; ACO: ant colony optimization; GA: genetic algorithm.
Despite the aforementioned, several differences between ENHS and IACO emerge in the analysis. For instance, the proposed ENHS provides generated paths with shorter lengths than IACO.
Figure 6 is a graphic presentation of the length data in box plots. The box plot is used to interpret samples in which statistical asymmetry may exist because it decreases the influence of biased values. In each diagram, the box dimension is related to the quartile deviation of the sample and can be interpreted as a dispersion graphic measure. A straight segment inside the box indicates the median value (

Box plots of length data: (a) Environment 1; (b) Environment 2; and (c) Environment 3.
It is essential to point out some atypical data generated in ENHS, whose values exceed the corresponding limits in the box plot. The presence of biased values negatively affects the mean distance and standard deviation measures, indicating that the ENHS results tend to be less consistent than IACO.
Consider the following observations:
IACO provides solutions with a larger mean distance and a higher data spread in the simplest environment. In the box plot corresponding to Environment 1, the median and maximum values of IACO are very close, implying that approximately 50% of the executions return the biggest solutions. On the other hand, ENHS presents lower mean, median, and sample dispersion values. Furthermore, the mean value is less than the median (see Table 2), implying that ENHS is prone to generating minor distance data for this environment. IACO maintained its behavior in Environment 2, obtaining the longest planned routes and the highest quartile deviation. At the same time, ENHS performs better in reducing path length: it gets a mean distance of 171.24u and a quartile deviation of 0.59u, representing a decrease of 6.6% and 216% concerning the corresponding IACO values. For the third environment, IACO continues to present the highest values of statistical trends. The mean length obtained by IACO is 203.58, representing an increase of 10.2% compared to the lowest mean value in ENHS. Once again, ENHS presents a mean length value less than the median (see Table 2).
That IACO converges to length values greater than ENHS should not be associated with the fact that a local minimum could not exceed in the optimization process. Instead, the difference can be the result of other factors, such as its movement constraints (Figures 3 and 4).
An excessive delay by the path planning module can negatively influence the performance and stability of the subsequent control modules implemented in the vehicle; therefore, performing an analysis of execution time is essential. Figure 7 contains a graphical representation of the time data from Table 2.

Execution time.
IACO has a higher mean execution time for the simplest environments. That is expected because node selection probabilities use many computational operations in each iteration. On the other hand, IACO uses only collision-free paths for search, treating the two planning objectives separately. Treatment like this harms, in general, the execution time, but it gives it robustness from path complexity changes. Indeed, the evidence aligns with the empirical reasoning that, in an environment with a high concentration of obstacles, having fewer available free cells for ant movement accelerates the concentration of pheromones on the shortest path. Hence, this type of environment should favor IACO.
The mean execution time in ENHS increases considerably as the environment becomes more complex. For example, the execution time in Environment 3 corresponds to 22 times the value in Environment 2 and more than 1000 times the value in Environment 1. That happens because the HS method includes the two control objectives in the fitness function. So, the expansion of obstacle areas increases the number of invalid solutions and makes it difficult to search in complex environments, forcing the algorithm to repeat itself if it fails to eliminate collisions on the first try. That translates into a more significant expenditure of time and resources.
The large time standard deviation value for ENHS in Environment 3 confirmed the above phenomenon (see Table 2). The time standard deviation in the experiment is related to the frequency at which various failures occur in route generation. If the algorithm fails
In the case of complex environments, it is necessary to consider the precision required by the mission and the dynamics of the guidance and control system. In general, the increase in execution time observed in ENHS is substantially more significant than the reduction in distance achieved concerning IACO. Therefore, IACO is recommended in path planning for complex environments unless the mission’s requirements indicate otherwise.
Conclusion
The path planning task for an AGV is a length minimization and obstacle avoidance problem. This article compares two metaheuristic methods to solve the path planning problem in a bidimensional scenario. A grid method for environment modeling is used, and several simulated experiments are performed in different operating terrains. When studying the optimization strategies, it is noted that the metaheuristic techniques can be successfully adapted to find an optimum route. However, the experiments show that, compared to IACO, ENHS performs better in searching for minor or medium complexity scenarios. As the obstacle zone increases, the performance mentioned above deteriorates quickly; IACO is preferable for highly complex scenarios.
Future work
The results of this study provide valuable guidance for those tasked with selecting a metaheuristic method to implement in a path planning module, considering the anticipated complexity of the environment. As a prospective avenue for further exploration, expanding the conditions of the considered trajectories in experiments is suggested. Investigating the performance of these algorithms in generating paths with specific curvatures or under temporal constraints may be relevant to the specifications of particular research endeavors. Additionally, the consideration of additional parameters, such as variations in environmental density or the presence of dynamic obstacles, could be examined to evaluate the adaptability and robustness of the algorithms across a wider range of scenarios. This diversification of experimental conditions could enhance the understanding of the capabilities and limitations of path planning algorithms in diverse and complex environments.