
Abstract
Introduction
One of the major advantages of automatic path planning capability for an Unmanned Aerial Vehicle (UAV) is the increase of safety for the vehicle itself. If a communication problem occurs in a remotely controlled telemetry UAV system, the vehicle can detect such a fault with the control station and plan a safety path to navigate to a location that allows communication to be restored. In a situation where there is a permanent loss of communication system, such as damage in radio antenna, the UAV can plan a path to a safe place for an attempt to land, avoiding the exposure of people to the risks of this landing procedure. Another advantage would be the ability of an UAV to adapt itself to changes in a previously planned mission, planning paths to its navigation to accomplish new tasks. Reviews on development and applications of UAV path planning are available on the literature. 1,2
Automatic path planning is a complex problem due to: the avoidance requirement of air exclusion zones (no-fly zones); the avoidance requirement of collision situations with obstacles; and the kinematics and dynamics constraints of the vehicle. This problem can also be observed with another type of vehicles, such as unmanned ground vehicles, 3,4 unmanned surface vehicles, 5,6 and underwater vehicles. 7,8 In this problem, a dynamically feasible path must be planned between a start point and an end point of a navigation environment, allowing the vehicle to navigate, avoiding air exclusion zones and collision situations with obstacles in that environment. The path planning consists of three main steps: the computational modeling of a navigation environment; the planning of a collision-free navigation path; and the conversion of this path into a dynamic feasible path. 1,9
With the increasing capacity of processing and storage of computational data into ever smaller and cheaper devices and with the greater industrial and military interest, the path planning problem has been widely explored. Different abstractions and solutions for path planning have been proposed, among them a class of solutions are called
Although RRT is probabilistically complete, there is no guarantee that the solution found will be a path with an approximate length of the shortest path (optimal solution) length for a given navigation environment. Some solutions were proposed with the objective of achieving this characteristic. These algorithms are asymptotically optimal, which means that the best path can be obtained by them as a solution, preventing the number of samples tends to infinity. Examples of these algorithms are rapidly exploring random graph (RRG) 12 and RRT*. 13 RRT* algorithm incorporates asymptotic optimality to the RRT algorithm. In RRT*, for each new node added to the tree, its neighborhood of nodes is generated with a given radius distance. Different from the standard RRT algorithm, the new sampled node is not added to the nearest node. Instead, the new sampled node is added to its neighbor node that provides the shorter path length to the root node (navigation starting point). Next, it is verified if the other nodes of its neighborhood can be reconnected with this new node to reduce the length of the path between them and the navigation root node. Thus, when a complete path is planned, it is expected to obtain the shortest path between the root node and the final navigation point. Therefore, there is a larger probability that the navigation path planned by the RRT* algorithm have a smaller length than the paths planned by the standard RRT. 13
Its important to note that there are some disadvantages of the RRT* algorithm compared to RRT. Although the RRT* algorithm returns a path of shorter length than the standard RRT, the planning time is considerably longer in the first. That is due to the addition of the process of reconnection of the edges during the tree expansion, which involves additional collision tests to its execution. In addition, the algorithm only ensures that the shortest path is planned if the planning time is infinite, which in real path planning applications cannot be feasible.
There are several works that have proposed solutions to reduce the convergence time of the RRT* solution applied to the planning of navigation paths. In these works, heuristics/strategies are used to bias the sampling process of RRT and RRT*, prioritizing sampling of new nodes in certain regions of the navigation environment. Among these works, we can mention
The contribution of this work is the study of the use of two different sampling strategies in the RRT*: the spatial distributions of samples based on Sukharev grids
9
; and the application of samples defined by the convex vertices of the safety hulls of navigation environment obstacles. The safety hull is a region that confines the whole body of an obstacle, with its vertices defined at a certain safety distance from the obstacle edges. It is generated to use in cases where the vehicle exceeds its limits, avoiding collisions with the real limits of the obstacle. A new algorithm is proposed in this work to study these two sampling strategies:
This work is structured as follows: in the second section, the RRT and RRT* algorithms are described; the third section presents the RRT*-Smart algorithm; in the fourth section, the concept of a Sukharev grid is presented; in the fifth section, the use of convex vertices of the safety hulls of obstacles is discussed; in the sixth section, the RRT*-SV algorithm is introduced; in the seventh section, the results of the simulations between RRT*, RRT*-Smart and RRT*-SV are described and analyzed; in the eighth section, conclusions and future work are discussed.
RRT and RRT* algorithms
The RRT algorithm for path planning is described in Algorithm 1. RRT algorithm constructs a tree that explores the navigation environment
RRT algorithm.


The algorithm works by expanding the tree
Several extensions of the RRT algorithm have been published over the years: adaptative RRT based on Dynamic Step (DRRT), 23 RRT Star (RRT*), 13 Fast RRT, 24 Real-time Closed-loop RRT (CL-RRT) 25 and its derivation Closed-loop Random Belief Trees (CL-RBT), 26 Resolution Complete RRT (RC-RRT), 27 Execution extended RRT (ERRT), 28 Chance-Constraint RRT (CC-RRT), 29 CC-RRT*-D, 30 RRT-Connect, 31 among others. Therefore, the variability of studies focused on improving or adapting some aspect of the RRT algorithm is remarkable.
The difference between the RRT algorithm and the RRT* is in the tree expansion mode. During the expansion operation, a path cost function formed to calculate the impact of the addition of a new node is considered. The cost function represents a measure of generic magnitude (depending of the defined restrictions to each path planning problem). In this work, the cost of the path is defined by the accumulation of the Euclidean distance between the nodes of
The additional RRT* operations are:
The cost of a path between any two nodes

where
For each
Extend procedure of RRT* algorithm.


After defining the shorter path from
Rewire procedure of RRT* algorithm.


RRT*-Smart
RRT*-Smart
17
is an algorithm based on the RRT* algorithm, where two new concepts have been incorporated: path optimization; and intelligent sampling. As presented in Islam et al.,
17
RRT*-Smart has an average time to plan the shortest path lesser than the RRT* algorithm. The RRT*-Smart algorithm is described in Algorithm 4. The additional procedures of the RRT*-Smart algorithm are described as follow:
RRT*-Smart algorithm.


Path optimization is a strategy based on triangular inequality, where the size of the largest side
Path optimization procedure from RRT*-Smart algorithm.


Intelligent sampling is an approach that uses the nodes of a previously planned path to induce the collection of new samples close to them. When a path is planned, its nodes are stored in
Sukharev grid
Sukharev grid is part of a group of point dispersion approaches called
A Sukharev grid is generated to a given quantity of cells

where

Distribution of cells generated by the Sukharev grid for
Convex vertices and path planning
In the representation of the navigation environment through polygons, obstacles are defined by vertices connected by edges that define their limits. Depending on the spatial arrangement between two edges with the same vertex in common, this vertex can be classified as convex or concave. Considering the vertices of a polygonal obstacle ordered clockwise, a vertex
The application of convex vertices in path planning is best known through the visibility graph algorithm.
32
A visibility graph allows to plan the shortest path between any two positions in a navigation environment. The idea of the method is to connect the convex vertices of the safety hulls of the obstacles to each other, since they form free collision edges, generating a graph called

Example of a security hull (blue) of an obstacle (black) of a navigation environment.
After the construction of the graph, the nodes

Example of a shortest path (red line) planned in a visibility graph.
The development of the algorithm proposed in this work is based on this property of the visibility graphs. In this case, the convex vertices of the safety hulls are considered as elements of
RRT*-SV algorithm
The algorithm presented in this work, called RRT*-SV (RRT* Sukharev vertices), incorporates two concepts to the RRT* sampling strategy: Sukharev grids and convex vertices of obstacle safety hulls. The path optimization procedure of the RRT*-Smart algorithm is also included on the novel algorithm. RRT*-SV algorithm is described in the Algorithm 6. In comparison to RRT*-Smart, RRT*-SV has the following additional procedures:
RRT*-SV algorithm.


Sampling procedure by convex vertices from RRT*-SV algorithm.


Sampling procedure by Sukharev grid from RRT*-SV algorithm.


In the RRT*-SV sampling process, three attempts are made to generate a new sample to be inserted into the tree. At first one, the algorithm tries to generate

(a) In scenarios where Sukharev centroids or convex vertices are not available to extend the tree, the uniform sampling of the standard RRT algorithm is performed in RRT*-SV. (b) Similar to what occurs in standard RRT, initially a

Flowchart of the RRT*-SV behavior. RRT: Rapidly exploring Random Tree; SV: Sukharev vertices.
Further details on the use of each of the strategies proposed in the RRT*-SV algorithm are given in the following subsections. The expected improvements of each is also presented when they are applied as sampling strategies.
Role of convex vertices in the RRT*-SV algorithm
In the process of sampling by convex vertices, each new node sampled from the navigation environment is a convex vertex contained in
In this sampling strategy,

Stages of the sampling process based on convex vertices: (a) a random sample
Collision strategy of the RRT*-SV algorithm
In this work, the obstacles are encapsulated by safety hulls. The distance between the edge of the safety hull and the edge of the obstacle takes into account the size of the vehicle and a safety margin. Thus, the edges and the convex vertices of the safety hulls can be used as structures of a path in the planning process, allowing the safe navigation of the vehicle through them.
Based on these preambles, RRT*-SV algorithm does not verify collision situations between two sequential convex vertices of the same safety hull. However, when two convex vertices of the same safety hull are not sequential or belongs to different hulls, then an edge that connect these two nodes can cause a collision situation with some encapsulated obstacle. These situations are illustrated in Figure 7.

Example of a valid path between
RRT*-SV algorithm uses a collision checker module to verify two types of collision situations: the mentioned collision situations of nodes and edges formed by convex vertices; and the collision situations that can be caused when the sampling is generated through a Sukharev grid, or by an uniform distribution, that is the sampling process of the standard RRT algorithm. In all cases, the collision check process consists in verifying if the edge joining two samples intercepts some safety hull of the navigation environment. There is a collision if there is an intersection, and there is no collision if there is no intersection or if the intersection occurs only with the edge of some safety hull, as explained previously. The structure and relations between the navigation environment, the collision checker module and the sampling strategies of the RRT*-SV algorithm are defined on a diagram block, that is presented in Figure 8.

Block diagram of path planning by RRT*-SV algorithm. RRT: Rapidly exploring Random Tree; SV: Sukharev vertices.
Role of Sukharev grids in the RRT*-SV algorithm
The centroids of the uniformly distributed cells of the Sukharev grid are used as samples of the navigation environment by the RRT*-SV algorithm. The purpose of using the Sukharev grid is to force the exploration of all navigable regions of the navigation environment, without necessarily sampling all possible points of these regions. Therefore, all the infinite points inside a cell can be represented by a unique point, which is the cell centroid. The expected effects are a smaller number of points sampled to plan a viable path for navigation, to decrease the planning time of a path. The use of Sukharev grids in sampling-based algorithms has already been explored experimentally and theoretically in previous studies.
35
–37
On the context of RRT*-SV, the Sukharev grid sampling process is also useful in situations where it is not possible to connect

Stages of the sampling process based on a Sukharev grid: (a)
The process of using a sample of the Sukharev grid, composed by square cells, consists of three steps. In the first step, for a given
Asymptotic analysis of RRT*-SV
Time complexity
The computational time complexity of the RRT*-SV algorithm is based on the complexity of the line 8 and the complexity of the loop of the line 9 of the Algorithm 6. The generation of the Sukharev grid, performed by operation
The time complexity of
The
As previously described, the
Finally, the total time complexity of the algorithm is
Compared to RRT* and RRT*-Smart algorithms, that have computational complexity equal to
Computational tests with the RRT*-SV algorithm
Three sets of computational tests were realized aiming the comparison between the RRT*, RRT*-Smart, and RRT*-SV algorithms, the last proposed in this work. The three algorithms were applied to such sets of computational tests and compared considering the planning time and the length of the planned paths. Each set of computational test was elaborated, considering bi-dimensional navigation environments with static obstacles. However, the algorithm can be applied to three-dimensional navigation environments with minor adaptations based on the navigation altitude of the vehicle. The main parameters of the algorithms are described in next subsection. The three sets of computational tests are described in subsequent subsections.
Parameters of the algorithms
This subsection describes the parameter values of the algorithms used in all computational tests. The
First set of computational tests
Some considerations were made in the first set of computational tests. A single obstacle navigation environment is used, as illustrated in Figure 10. The navigation environment was represented in a Cartesian plane, where the length corresponds to the interval [0.0, 1000.0] in the horizontal axis (

First set of computational tests (to one simulation): (a) first path planned by RRT* in iteration 457 (non-optmized), (b) by RRT*-Smart in iteration 457, but optimized (red segment), and (c) by the RRT*-SV in iteration 10. The paths planned by the algorithms in the 30, 000 iteration are shown in (d), (e), and (f), respectively. RRT: Rapidly exploring Random Tree.
Considering just one of the simulations as example (which is illustrated in Figure 10), the RRT*-SV algorithm planned a path with length equal to 1246 in the iteration 10. This path corresponds to the optimal solution. Figure 10 illustrates the paths planned by each algorithm to this specific simulation result. Observing the figure cited, it is possible to note that the path planned by the RRT*-SV has a smaller length than the path planned by the other algorithms. The algorithms RRT* and RRT*-SV planned the first path on this result only in the iteration 457. These two algorithms planned the first path in the same iteration because they use the same sampling mechanism until the planning of the first path. However, after planning the first path, the RRT*-Smart algorithm uses a different strategy, based on path optimization through beacons, as previously mentioned.
Through an analysis of Figure 10(a) and (b), it can be observed that the path planned by the RRT*-Smart is the optimized version of the path planned by the RRT*, because the path generated by the first algorithm shares nodes with the path generated by the second, characteristic already presented by Islam et al. 17 This shows that the simulations are in conformation to what is presented by Islam et al. 17
Table 1 presents the average values generated by each algorithm to plan the first path in the 100 simulations with different seeds. RRT*-SV planned the first path, on average, at a run time equal to 0.001 s. The planning time of the RRT* is similar to that of the RRT*-Smart. The first algorithm spent 0.086 s to plan the first path and the second algorithm 0.097 s. The slight difference between these planning times can be assigned to the path optimization procedure of the RRT*-SV. Comparing planning times and lengths, RRT*-SV was 99% faster than RRT*-Smart and still got a 5% shorter path length on average, delivering much better performance in these simulation.
First set of computational tests: average values spent for each algorithm to plan the first path, considering 100 Simulations.

RRT: Rapidly exploring Random Tree; SV: Sukharev vertices.
In Figure 11, there is a chart of the average length of the paths planned by each algorithm over 30, 000 iterations. It can be observed that the RRT* and RRT*-Smart could not plan the shortest path, that is, the optimal solution (orange horizontal line), in 30, 000 iterations. On the other hand, the RRT*-SV algorithm has planned the near shortest path close to the iteration 2000.

First set of computational tests: average path length by iteration, considering 100 simulations.
In Figure 12, it is illustrated the chart that represents the iterations in which each algorithm, on average, produces paths that reach or exceed certain fixed values of lengths. There is a large difference in the number of iterations required for each algorithm to achieve the shortest length values. While RRT*-Smart needs 2014 iterations to produce a path of length equal to 1300, a path that was planned by RRT*-SV in 42 iterations had already reached that value. However, it is also necessary to verify the computational time that each algorithm needs to reach each number of iterations, since these algorithms differ significantly in the generation of a new sample of the navigation environment.
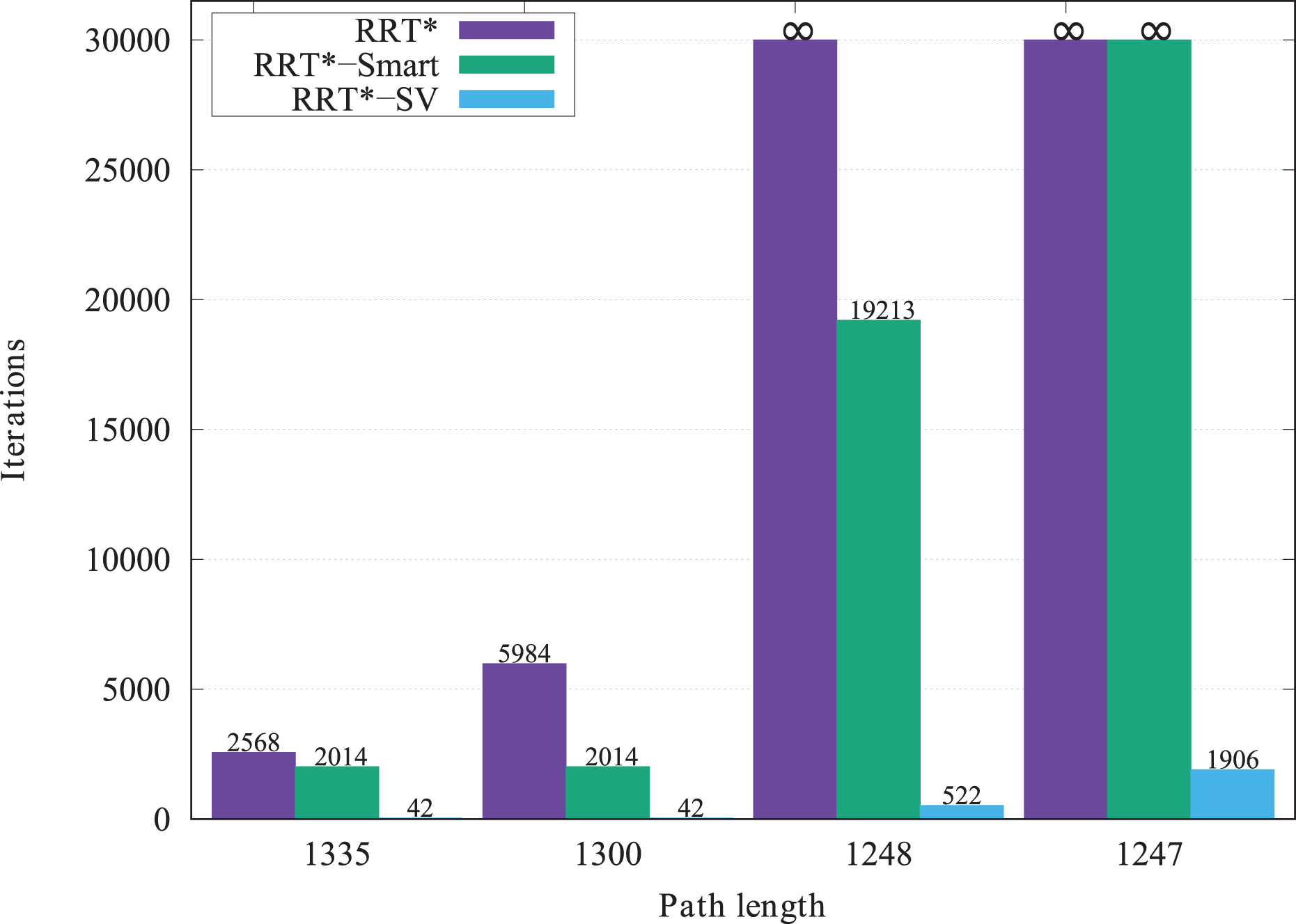
First set of computational tests: average quantity of iterations for each algorithm achieve a specific path length, considering 100 simulations.
Figure 13 presents the chart that relates the computational time required for each algorithm to produce paths that reach or exceed the fixed length values. The planning time of RRT*-Smart to plan a path with length of 1248 was 17.060 s versus a path with length of 0.031 s planned by RRT*-SV. This represents a difference of 99.8% between the planning times, which demonstrates notorious superiority of RRT*-SV over the RRT*-Smart (and consequently over the RRT*) in convergence for a shorter path length and planning time in this computational test.

First set of computational tests: average planning time for each algorithm achieve a specific path length, considering 100 simulations.
Second set of computational tests
The performance of the RRT*-SV algorithm is dependent of the quantity of convex vertices contained in the navigation environment. The increase of the number of convex vertices implies an increase in the computational complexity of the algorithm RRT*-SV. To analyze the influence of the number of convex vertices on the RRT*, RRT*-Smart and RRT*-SV performance, computational tests were executed using navigation environments with 5, 50, 2500, and 10, 000 obstacles. Each obstacle (and also its safety hull) is a rectangle, resulting in four convex vertices. Then, each navigation environment has, respectively, 20, 200, 10, 000, and 40, 000 convex vertices. For each of these navigation environments, five computational tests were performed with a different seed to generate the
As described in Table 2, RRT*-SV planned the first path faster than RRT* and RRT*-Smart algorithms, considering the navigation environments with 5 and 50 obstacles. In other environments, RRT*-SV planned the first path in a longer run-time, in comparison with the other algorithms. The greater the number of convex vertices, the greater the difference of the time spent by the RRT*-SV algorithm to plan the first path, in comparison with the times spent by the others algorithms also to plan a first path. In the navigation environment with five obstacles, the RRT*-SV algorithm planned a first path at 0.001 s and the RRT*-Smart at 0.039 s, what corresponds to a difference of 97%. In the navigation environment with 50 obstacles, the RRT*-SV planned the first path at 0.010 s and RRT*-Smart at 0.122 s, an advantage of RRT*-SV of 92% over the RRT*-SV. In the 2500 obstacles navigation environment, RRT*-SV planned the first path at 16.617 s, and RRT*-Smart at 4.119 s, so this time RRT*-Smart get advantage of over the RRT*-SV, corresponding to 75%. In the navigation environment with 10, 000 obstacles, the RRT*-SV spent 183.393 s to plan the first path and the RRT*-Smart 42.594 s, a difference of 77% between both algorithms. However, it is important to check the length of the final path planned by each algorithm in each navigation environment. The first paths planned by the RRT*-SV algorithm are presented in Figure 14.
Second set of computational tests: average planning time spent by the algorithms, considering five simulations for each of the four fixed-length values, and considering navigation environments with 5 obstacles, 50 obstacles, 2500 obstacles, and 10,000 obstacles.

RRT: Rapidly exploring Random Tree; SV: Sukharev vertices.

Second set of computational tests: first path planned by RRT*-SV, considering navigation environments with (a) 5, (b) 50, (c) 2500, and (d) 10, 000 obstacles. RRT: Rapidly exploring Random Tree; SV: Sukharev vertices.
Figure 15 presents the chart of the run-time required by each algorithm to produce paths that reach or exceed some fixed-length values, considering four configuration of navigation environments. In Figure 15(a) and (b), the RRT*-SV presents planning time smaller than the planning times of the other algorithms to reach the fixed lengths. In Figure 15(c) and (d), it can be seen that the RRT*-SV only gains advantage over the other algorithms considering the last fixed path lengths of 1369 and 1410, respectively (RRT* and RRT*-Smart were unable to plan paths with these fixed-length values). This fact implies that, even for navigation environments with high quantities of obstacles, RRT*-SV can converge more quickly to better solutions.

Second set of computational tests: information about the first paths planned by the algorithms, considering navigation environments with 5, 50, 2500, and 10,000 obstacles.
Therefore, for this second set of computational tests, it is concluded that RRT*-SV tends to converge more quickly to shortest paths than RRT*-Smart, and consequently, than RRT*. However, in navigation environments with many obstacles (2500 and 10, 000 obstacles), RRT*-SV algorithm tends to have a higher run-time to plan a first path. Therefore, it is suggested to use each algorithm depending on the requirements and characteristics of the path planning problem to be explored. In navigation environments with high quantity of obstacles, if a path must to be planned in the shortest time possible, RRT*-SV cannot be the most appropriate. However, if the requirement is to obtain a path with minimized length, the RRT*-SV offers advantage over the other algorithms analyzed in this work.
Third set of computational tests
In this section, it is described a set of computational tests aiming to a statistical comparison between the RRT*-Smart and the RRT*-SV algorithms by means of the statistical method denominated

Third set of computational tests: paths planned by the RRT*-SV algorithm, considering different configurations of navigation environments: (a) 5 obstacles; (b) 50 obstacles; (c) 100 obstacles; (d) 200 obstacles; (e) Maze; (f) Zigzag; (g) Spiral; (h) Narrow passage; and (i) U-form.RRT: Rapidly exploring Random Tree; SV: Sukharev vertices.
To define the quantity of simulations, the confidence interval (CI) was calculated for each of the computational tests, considering the nine navigation environments described previously. The CI value estimates an interval containing the hypothetical population mean at a given confidence level assuming that the results of the algorithms in the computational tests follows a normal distribution. The estimate of CI was calculated with 95% confidence level, which in the normal distribution corresponds to
Third set of computational tests: application of the

RRT: Rapidly exploring Random Tree; SV: Sukharev vertices; CI: confidence interval; std dev.: standard deviation.
In this third set of computational tests, statistical variables were modeled as random, without autocorrelation between the results of each simulation for each method and without dependence between RRT*-Smart and RRT*-SV results. To compare them,
Based on the results presented in Table 3 for the statistics about the length of the planned paths at the end of the simulation iterations, in the computational tests with the RRT*-SV, the average length of the paths was shorter, for all navigation environments considered, than the average length of the paths obtained in the computational tests with the RRT*-Smart algorithm. Moreover, the standard deviations of RRT*-SV averages are smaller when compared to the standard deviations obtained by the RRT*-Smart, that is, the lengths of the paths obtained with RRT*-SV are smaller and vary less than those planned by the RRT*-Smart, for the quantity of iterations considered. The values of the
Analyzing the data of Table 3, RRT*-SV does not present the best performance, considering the statistical data generated for the planning time. The navigation environment with a narrow passage is the unique case where the algorithm has no statistical difference in relation to the RRT*-Smart, since the absolute value of
The idea of using the convex vertices in the RRT* sampling process is to accelerate convergence to a solution of the algorithm. To assist in the hypothesis that this will occur,
The statistics related to the first planned paths on the simulations are described in Table 4. In the navigation environment with five obstacles, RRT*-Smart obtained better performance than RRT*-SV for the planning of shorter first paths. For two navigation environments (cluttered 50 obstacles and cluttered 100 obstacles), RRT*-Smart and RRT*-SV were statistically equal to the lengths of the first planned paths. For the other navigation environments, RRT*-SV obtained better performance for the planning of shorter first paths. In addition, RRT*-SV spent smaller planning time for seven navigation environments: cluttered 5 obstacles, cluttered 50 obstacles, U form, Spiral, Zigzag, Maze, and Narrow Passage. For two of them, cluttered 100 obstacles and cluttered 200 obstacles, it is not possible to discard the null hypothesis about the planning time, since the absolute
Third set of computational tests: application of the

RRT: Rapidly exploring Random Tree; SV: Sukharev vertices; CI: confidence interval; std dev.: standard deviation.
Considerations about the results
It can be concluded from the results presented that the smaller the number of convex vertices in a navigation environment, the more appropriate is the use of RRT*-SV as a means to solve path planning problems. The performance of the algorithm is highly penalized by the quantity of convex vertices of the navigation environment, however, it has a high efficiency in planning a first path (without fixing the required length) and converging to better solutions faster than the RRT* and RRT*-Smart algorithms. As presented, even for navigation environments with a large number of convex vertices, convergence for shortest paths is faster with the application of RRT*-SV than with the use of RRT* and RRT*-Smart, provided there is sufficient planning time for this purpose.
Technical aspects of the computational tests
RRT*, RRT*-Smart, and RRT*-SV algorithms were implemented in the C++ programming language and compiled with Microsoft Visual Studio Compiler version 14. CGAL, 43 computational geometry library was applied in the geometric representation of the navigation environments and in the collision check with the obstacles. The k-d-tree implementation of the approximate nearest neighbor (ANN) 44 library was used in the search of nearest convex vertices. OpenGL library was used for the graphical representation of the computational tests. The computational tests were run on a computer with Windows 10 64-bit operating system, 16 GB of memory and processor Intel i7-2820QM with 2.30Ghz clock.
Conclusion
This article presents a study of a new sampling strategy based on convex vertices of safety hulls of obstacles and Sukharev grids. The strategy was incorporated into the RRT* algorithm, creating a new path planning algorithm called RRT* Sukharev Vertices (RRT*-SV). The efficiency of the new algorithm is verified through computational tests considering navigation environments with different spatial distributions and quantities of obstacles. For the computational tests considered in this work, RRT*-SV planned paths with smaller length than the paths planned by RRT*-Smart and RRT* algorithms, in almost all cases. However, when the number of convex vertices of the navigation environment increases, the planning time of RRT*-SV is considerably higher for some cases. However, even in this latter scenario, RRT*-SV planned the smallest paths more faster than RRT* and RRT*-Smart algorithms. In future works, it is desired to apply the RRT*-SV algorithm in planning of paths for UAVs. To meet the kinematic and dynamic constraints of the UAVs, it will be necessary to apply a smoothing method to the paths planned by RRT*-SV. In addition, as future development, it is proposed the accomplishment of research to optimize the process of selection of the nearest convex vertex in the process of expansion of the algorithm RRT*-SV, aiming at reducing the path planning time.