
Abstract
Introduction
In this paper, we propose an argumentation framework (AF). The formalism, examples, properties, and evaluations are shown in the following sections. Before this exposition, we briefly survey the field of argumentation and introduce the basic terminology in Section 1.1, detail our approach in Section 1.2, and explain the organization of this paper in Section 1.3.
Background
Argumentation is used in many fields. For example, design,
1
legal decision,
2
negotiation,
3
online debate,
4
fact check,
5
and computational provenance
6
are based on argumentation. The abstract structure used to represent this argumentation is modeled as an
The argumentation graph has been extended to include more semantics found in the actual argumentation. The
The evaluation of an argumentation graph solves the conflict of interest using some reasoning model.
7
The abstract AF
10
determines the semantics of an argumentation graph as a set of
The extension is a two-way distinction between the accepted nodes and the other nodes. By labeling the nodes, the distinction was elaborated into three-way as accepted nodes labeled
The similarity in argumentation was discussed in various contexts. Konat et al. 27 found that the rephrasing often occurred in some corpus from the corpus-based study. Walton28–30 studied the analogical reasoning based on the similarity of the argument structure. Budán et al. 31 proposed an analogy AF, which extends the abstract argumentation to cope with an analogy. Amgoud et al. 32 proposed a method to reduce an argumentation graph based on the logical equivalence between logical arguments. Boltužić and Šnajder 33 and Reimers et al. 34 proposed a method to cluster similar arguments. Budán et al. 35 introduced a coalition-based analysis that utilizes the similarity of arguments, where the coalition is a maximal conflict-free set of support relations. Budán et al. 36 introduced a method to define the strength of attacks and supports using a custom-made similarity measure. Amgoud et al. 37 and Amgoud and David 38 introduced adjustment functions to discount the values of similar attackers.
Approach
We take a
In the simulation phase, we generate a dynamical system, a map from a time and initial values to values at the time,
39
from an AF. The map is obtained from the solution (The solution is a function which satisfies the differential equations. This is not the solution of the minimization of the cost.) of differential equations generated from the AF. Unlike the previous approach using differential equations,
26
we generate differential equations from an AF through a cost model. The reason why we employ the cost model is that we need a common domain in which we can compare how each attack or support relation is satisfied, as explained in Sections 5.1.2 and 5.1.3. Each violation of the attack or support relation is specified by an expression of variables bearing values of proclaims. With this cost model placed between an argumentation graph and the dynamical system of differential equations, we have the model on which a sound interpretation of values is possible. Various semantics, such as similarity and negative support, as well as attack and support, can be described as constraints in the cost model. The differential equations are generated from the cost expression to reduce it like the gradient descent method. Unlike the standard gradient descent method, we fix some variables in the constraints of the claim relations to reflect their directionality. We call the cost model with this fixing trick a
Once the dynamical system is created, we observe the behavior of the system. A point in the dynamical system is in a higher-dimensional coordinate system corresponding to the values of proclaims. From an initial point at time
We can summarize the observation into concise values by averaging over the time of trajectories and further averaging over the space of initial points. The advantage of employing averaging for summarization is that the averaging is linear. Equalities in variables are inherited by a linear combination of variables.
The constructed framework is named the differential equation based on cost for recursive argumentation graph (DECRAG).
Organization
This paper is organized as follows. Section 2 is devoted to the formalism of DECRAG. First, we introduce the simulation phase in three sections. Section 2.1 introduces an argumentation graph structure. Section 2.2 introduces a partially clasped cost model as the integration model. We derived differential equations to reduce the cost in Section 2.3. Next, we introduce the aggregation phase in three sections. Section 2.4 introduces the definition of time and space averages. Section 2.5 explains the averages for a single variable. Section 2.6 describes the method of sampling calculation of the averages.
Before going into theoretical properties, we show examples to illustrate what can happen in DECRAG in Section 3. The valuation of toy graphs is shown to convey the idea of how DECRAG works in Section 3.1. Section 3.2 shows the similarities and differences between extension-based semantics and DECRAG by examples. Section 3.3 shows the ones between order-based semantics and DECRAG by examples. As variants to the extension semantics, we show examples of the weighted AF (WAF) in Section 3.4, those of the AF with recursive attack (AFRA) in Section 3.5, and those of attack-support AF (ASAF) in Section 3.6. Section 3.7 introduces examples to show how complex the behaviors can be.
Section 4 shows the soundness of DECRAG. Section 4.1 explains the basic properties of DECRAG. The group properties in quantitative bipolar argumentation framework (QBAF) are discussed in Section 4.2. The properties of attack and support not covered by the group properties are discussed in Section 4.3, and the properties of attack only are examined in Section 4.4. The properties of an argumentation graph with acyclic dependency are discussed in Section 4.5, and the properties of similarity are discussed in Section 4.6. The proofs are given in Appendix A.
We evaluate DECRAG in Section 5. The advantages of DECRAG are shown in the use of the applications in Section 5.1 and in the satisfaction of the principles advocated previously in Section 5.2. The disadvantages of DECRAG are examined in Section 5.3. We discuss the possibility of employing the previous work in Section 5.4. Section 6 concludes this paper.
Formalism
This section introduces a formalism consisting of an argumentation graph, a partially clasped cost model, differential equations, averaging, and sampling calculation.
Argumentation graph
Argumentation graph
The
For edge
We collectively call a node and an edge a
Unlike conventional graph theory, the destination of an edge can be an edge again. This edge is called a
The similarity weight
Isomorphism
An
If there is an isomorphism from
Partially clasped cost model
We measure how the claim relation and similarity semantics are violated and call the measured violation
For attack
Now, we explain the distinction of
For the recursive attack
If a proposition is described in natural language, we encounter similar propositions, and it is natural to assume that similar propositions have similar values. If this adjustment is possible by claim relations, it is simpler and desirable. However, a naive solution of propagating the value of
We introduce a proposition with the expectation that it is true. The principle that a proposition holds if it is not attacked is called the
Cost
The cost
In the following expression, we omit the suffix ranges
Differential equation
To handle the partially clasped cost, we take the derivatives of the cost with some variables fixed. Because each proclaim has its corresponding variable, the number of variables
Differential equation

In the calculation of
Let the order of the variable be 

Suppose that there are attacks
We denote the solution of this differential equation for an initial value
For a more precise analysis of the properties of the solution, we fix
For an example of 



Averaging
The entire solution of the differential equation is a set of trajectories for every initial value. A trajectory for an initial value can converge to a point called a
We take the time average of a trajectory. The distinction between a fixed point, a limit cycle, and aperiodic oscillation is lost. Because the entire solution is a set of trajectories, by taking the time average of the entire solution, we have a set of time-averaged values. The Results for the dilemma. Results for the recursive attack example of Figure 4 of Baroni et al.
46
(a) argumentation graph, (b) extension, 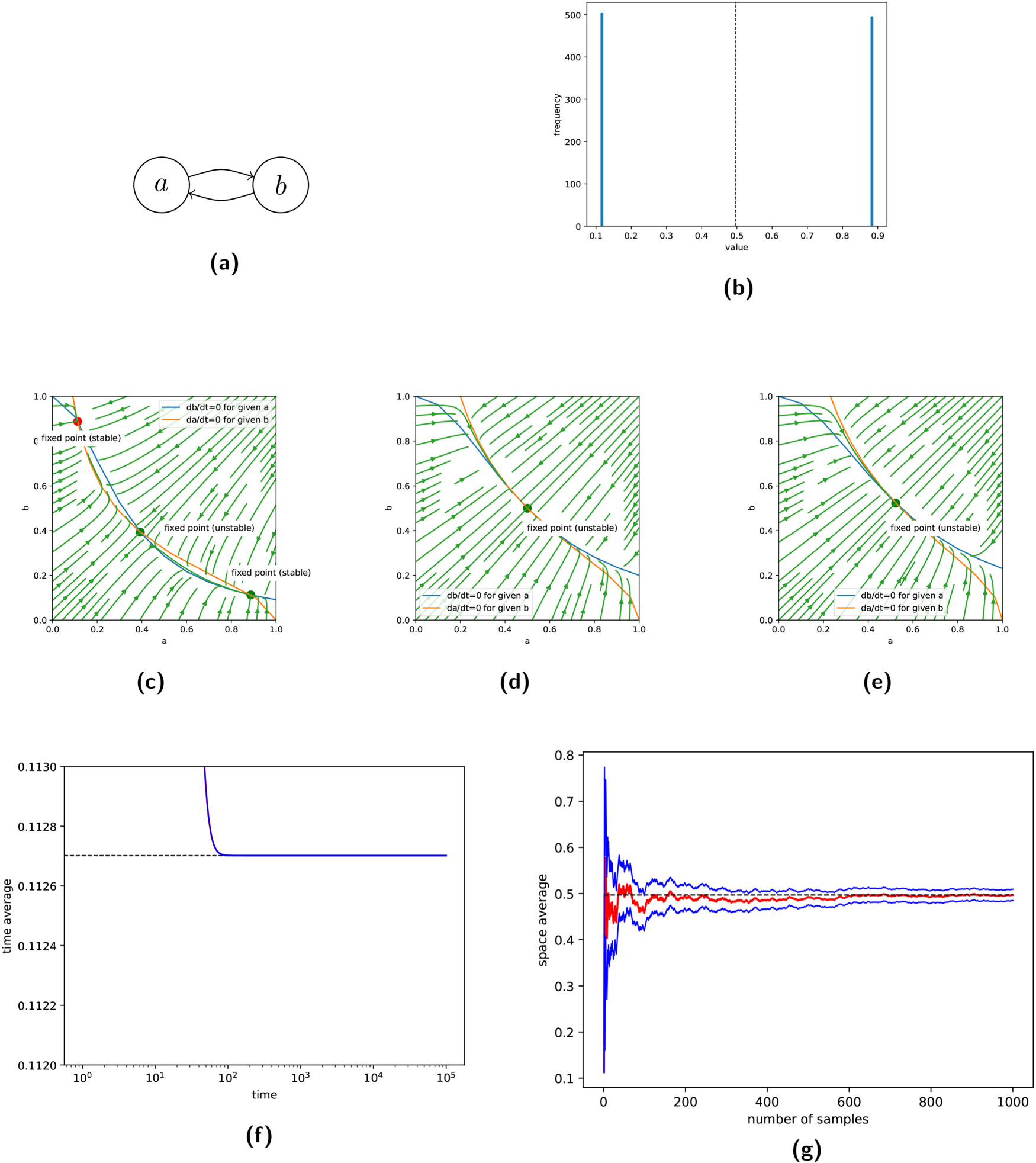



We take the space average of the time averages (if they exist). The space average is a single value. Trajectories and their time averages depend on the initial values. We may accidentally pick up an exceptional trajectory if a predetermined initial value is used. For example, as to the dilemma of Example 3.1, if we use the initial value at
We define the space average The
We often omit the integral range of
We used the uniform distribution 
Average of variable
Here, we consider the average of a single variable
The time average
We extend the time average to an expression of variables. For example,
The space average
The space average of a variable is extended to an expression of variables. For example,
This section discusses a practical method to compute trajectories and their time and space averages. Obtaining all the trajectories is intractable because the time domain is continuous and infinite, and the space domain is continuous. We overcome the complexity problem by sampling from a trajectory and sampling from initial values. The sampling error provides the estimation of precision. The details are explained below.
Approximate time average calculation
We explain a method to compute an approximate time average for a variable. Because a trajectory projected to a variable may go to a fixed point while the trajectory projected to another variable goes to a limit cycle, the classification is on a per-variable basis.
We denote the numerically computed solution as
As an error bound, we use the variance of a value. Let
In the following,
First, we explain methods to calculate the time average for each case.
The theoretical time average is
The theoretical time average is
Next, we estimate the variance for each case.
Let ε be the absolute tolerance, which is a parameter given to a differential equation solver.
The theoretical time average is 






If we do not know whether the trajectory is a fixed point, a limit cycle, or an aperiodic oscillation, we can try the calculation for the aperiodic oscillation because additional repetition is harmless, except that it is slow.
The solutions with different start times and initial values are independent. So, the samples can be calculated in parallel.
To obtain an approximate space average, we have to sample initial values and take the average of the resulting time averages, as in Section 2.6.1. Let
First, we explain methods to calculate the space average.
The space average is
Next, we estimate the variance for each case.
Fixed point, limit cycle. Let 



Here, we discuss the decidability of the equality of values. Suppose that the value 


Examples of the decision can be found in Section 3.
Examples
In this section, we show examples of how the formalism in Section 2 works. First, to get an impression of DECRAG, the valuation of the toy graphs is shown in Section 3.1. To show the relation between extension-based semantics and DECRAG, examples in their literature are illustrated in Sections 3.2. The relation between order semantics and DECRAG is shown in Section 3.3. As extensions of weights, support, recursive attack, and necessity support, we show examples of the WAF in Section 3.4, those of AFRA in Section 3.5, and those of ASAF in Section 3.6. Finally, as an example of complex behaviors, we show a limit cycle and aperiodic oscillation in Section 3.7.
Small example
First, we evaluate small graphs. If not stated otherwise, we use the prima facie principle (
Figure 5(b) shows the values for the attack in Figure 5(a). The number in parentheses is the estimated standard deviation (square root of the estimated variance) of the above value.

Results for the attack.
The relation
The values of the contradiction in Figure 6(a) are shown in Figure 6(b).

Results for the contradiction.
Figure 7(b) shows the values for the recursive attack in Figure 7(a).

Results for the recursive attack.
Next, we consider the dilemma (mutual attacks (

The phrase planes (visualization of the directional derivatives
39
) of

Next, consider the relation between attack and similarity. The solution of attack

Effect of similarity. Similarity weight versus space average for
This section shows the similarities and differences between the classical extension-based semantics and DECRAG by examples. First, we recall the definitions of popular extensions.
10
Let
Extension with a cyclic structure
Figure 2(a) is the argumentation graph in Figure 3.5 of Wakaki,
44
Figure 2(b) is its extensions, and Figure 2(c) show the values by DECRAG. The fixed point
In this example, DECRAG’s fixed points correspond to some extensions.
Next, we consider the effect of contradiction.
Extension with contradiction
Figure 10(a) is the argumentation graph in Figure 3.6 of Wakaki,
44
Figure 10(b) is its extensions, and Figure 10(c) is the values by DECRAG. For the fixed point, 
We show an example of order semantics.
Order semantics example
Figure 11(a) is Figure 1 of Bonzon et al.
12
In DECRAG with Results for the order semantics example of Figure 1 of Bonzon et al.
12

Dunne et al.
45
introduced WAF. WAF extends Dung’s AF by associating a weight (a positive real number) with each attack. In WAF, attacks having a total weight less than a given budget can be discarded when deciding on extensions. The counterparts of their weights in DECRAG are the claim term
Weight in WAF
Figure 12(a) is the argumentation graph in Figure 2 of Dunne et al.
45
Figure 12(b) is Results for various weights example of Figure 2 of Dunne et al.
45

AFRA
46
is a pair
Recursive attack in AFRA
Figure 13(a) is the argumentation graph in Figure 1 of Baroni et al.
46
Figure 13(b) is the extension, and Figure 13(c) is the values by DECRAG. The values at the fixed point are consistent with the extension 
Figure 3(a) is the argumentation graph in Example 2 of Baroni et al.,
46
Figure 3(b) is the extensions, and Figure 3(c) shows the values by DECRAG. The fixed point
Attack-support AF (ASAF)
ASAF
47
is a tuple
The values by DECRAG are consistent with some extensions except edges having low source nodes, as shown in the following examples.
Recursive attack in ASAF
Figure 14(a) is the argumentation graph in Figure 2 of Nofal et al.,
11
Figure 14(b) is the extensions, and Figure 14(c) is the values by DECRAG. The fixed point is consistent with the extension 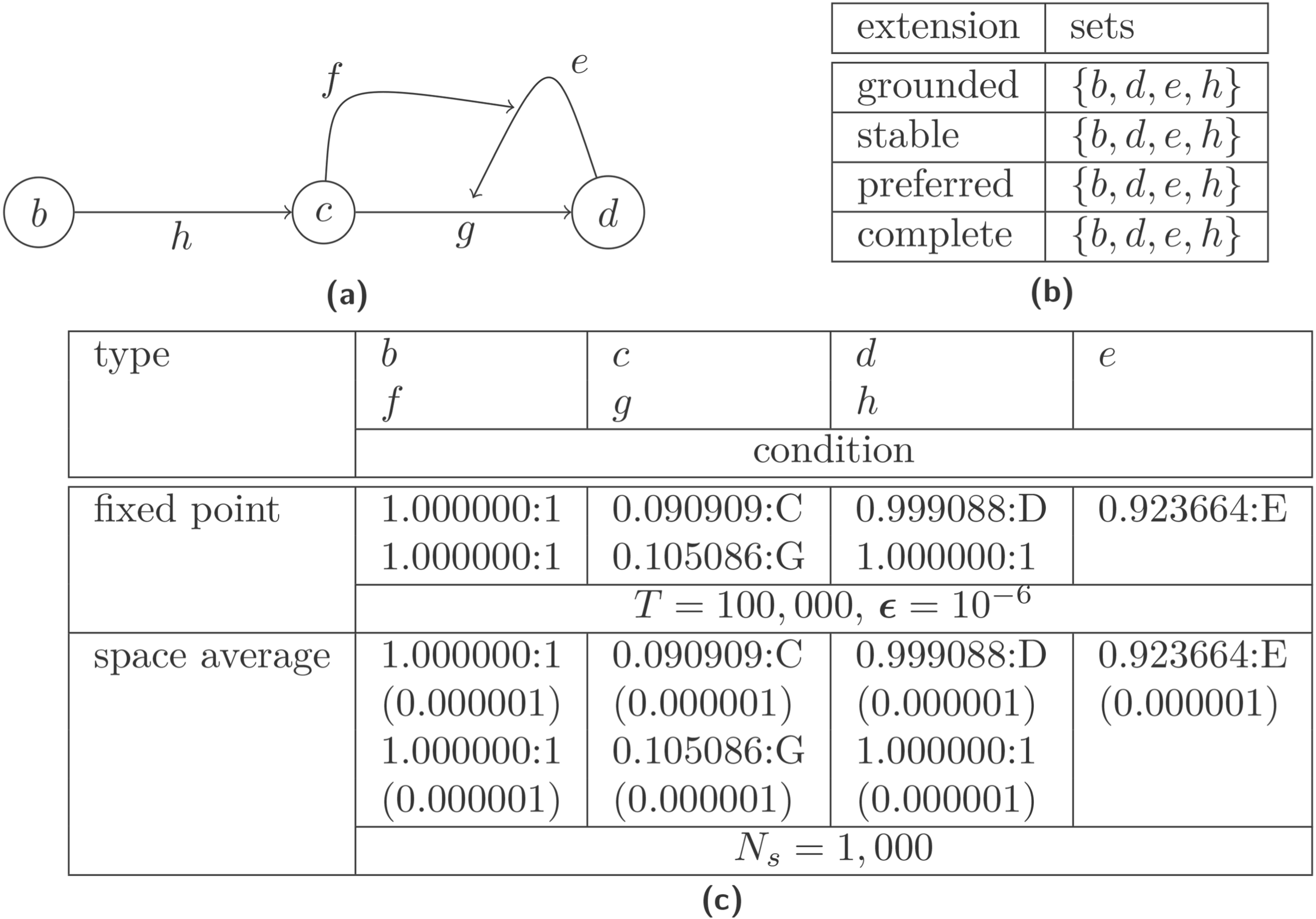
Figure 15(a) is the argumentation graph in Figure 1 of Cohen et al.,
48
Figure 15(c) is the extensions, and Figure 4 is the values by DECRAG.
Results for the necessity support example of Figure 1 of Cohen et al.
48
(a) Argumentation graph. 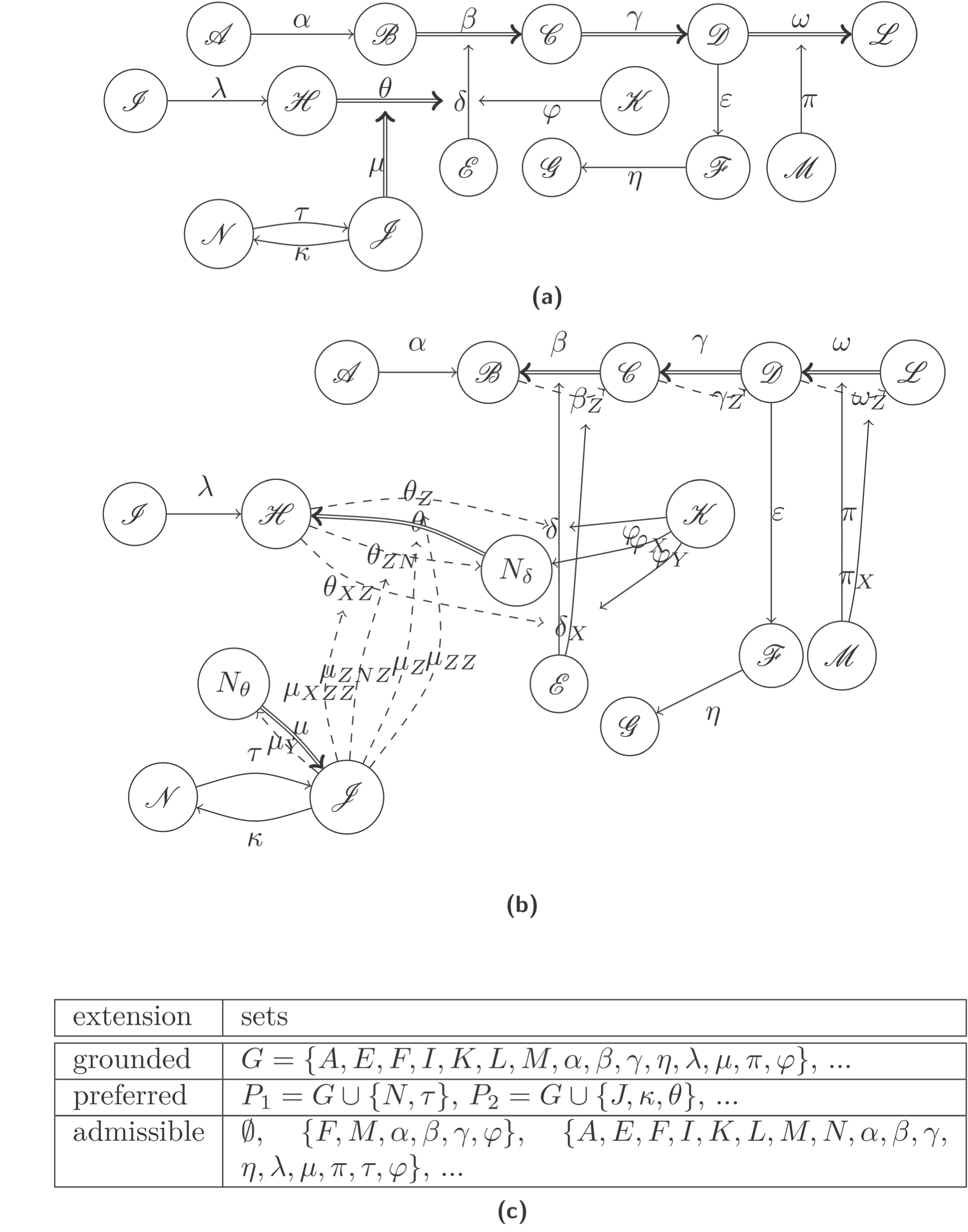
In DECRAG, necessity support is translated into a combination of support and negative support. The rules of the translation are as follows.
Necessity support from As one necessity support is translated into two claim relations, we must replicate a claim relation to the necessity support. For example, If the destination of the necessity support is an edge, the edge is the source of the translated support. Because a source edge is not allowed in DECRAG, we have to make a new node having the same value as the edge. For example, the necessity support from
This translation is possible if there is no cyclic dependency involving necessary support. This is not a severe limitation of this translation of necessity support because necessity support relations
The fixed point
To guarantee that a replicated nodge has the same values as the original, those variables should have the same values at time
Practically speaking, for a necessity support
In this section, we show examples that exhibit interesting behaviors.
First, we see the general behaviors of even-length cycles. To identify nodes in a cycle, we use a
Even-length cycle (ai →ai+1 (
) even
, cyclic index)
The dilemma in Section 3.1 is the simplest even-length cycle. In general, an even-length cycle (
Next, we consider odd-length cycles.
Odd-length cycle (ai →ai+1 (
) odd
, cyclic index)
For

Results for the odd-length cycle for
Experimentally, we found that the cyclic period becomes longer with larger

Odd-length cycle for
As an extension of the periodic oscillation of an odd-length cycle, we found a case of aperiodic oscillation.
We show an example of aperiodic oscillation based on the odd-length cycle of Example 3.7.2. Let

Results for the aperiodic oscillation by two limit cycles with

Results for the aperiodic oscillation by two limit cycles with
In the aperiodic case, the existence of a time average is not apparent. In this example, we can show the existence of the time average by Property 16. In the proof of the property, it was shown that the values of
In this section, we explore the general properties of DECRAG. In Section 4.1, we explain the properties of DECRAG to show the soundness of DECRAG. These properties are summarized in Table 1. Then, the properties of the previous work are discussed in Sections 4.2 to 4.6 and are summarized in Table 2. The group properties in QBAF are discussed in Section 4.2. Other properties of attack and support are discussed in Section 4.3. The properties of attack are examined in Section 4.4. The properties of an argumentation graph with an acyclic dependency graph are discussed in Section 4.5. The properties of similarity are discussed in Section 4.6.
General property for DECRAG.
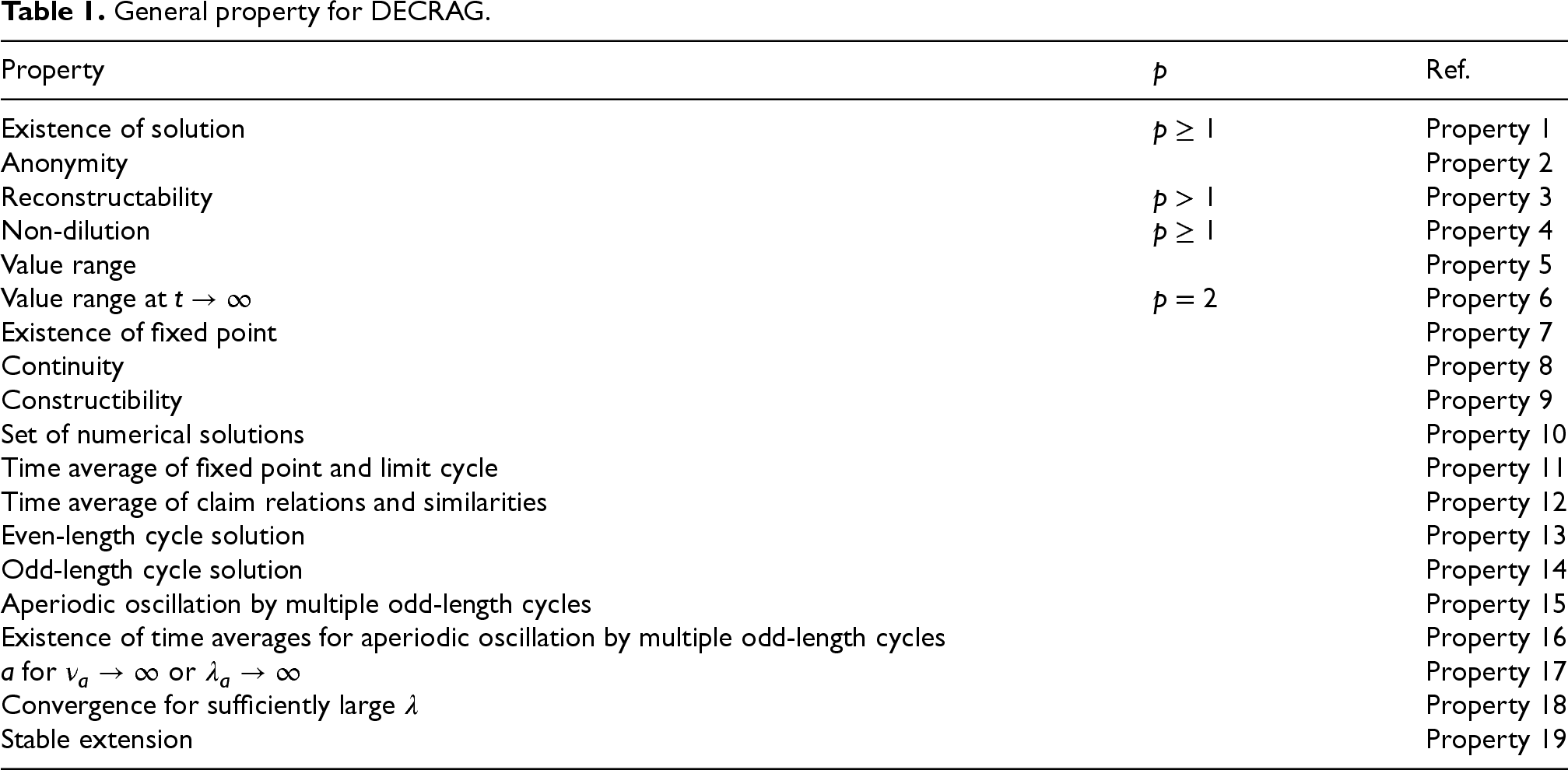
General property for DECRAG.
Property of valuation. The results for DECRAG of

Conditions for Table 2.
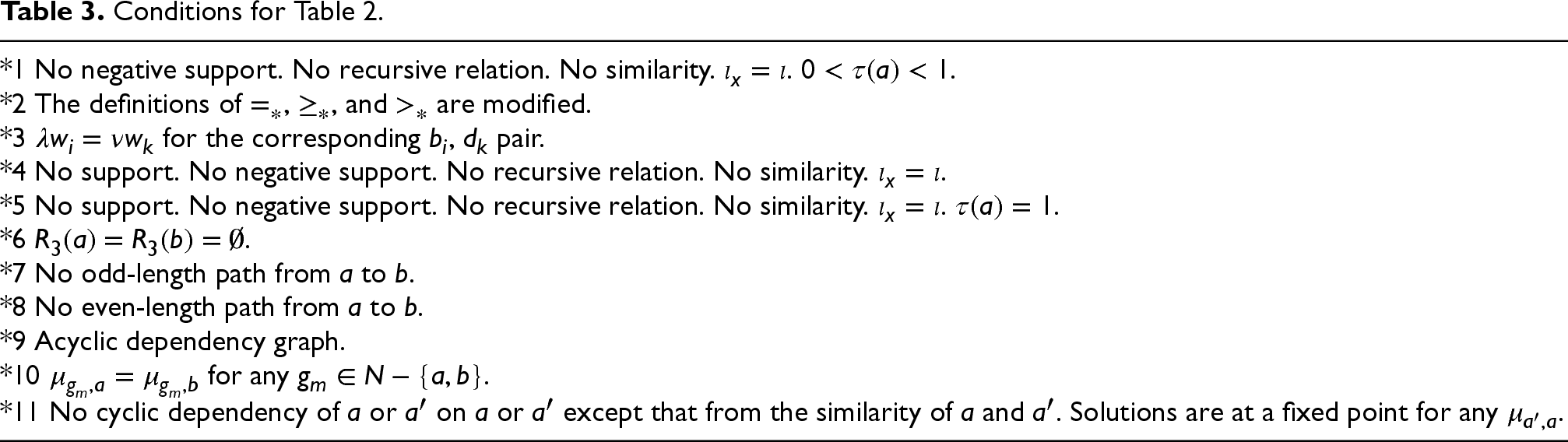
In this section, we explain the general properties of DECRAG. Properties 1 to 5 are proved for
The differential equations should have a solution for the basic soundness of DECRAG. The following property guarantees it.
Existence of solution 41
We confirm that the isomorphic graphs have the same values. To state the property formally, we first introduce some terminology.
Anonymity 20
If argumentation graphs are isomorphic, their corresponding variables have the same values at any time
The anonymity property means that the isomorphic nodes have the same value. Conversely, is it true that node structures are isomorphic if their values are the same? The following property gives an affirmative answer to this question.
Reconstructability (
)
If
Reconstructability means that no information is lost during the simulation phase in the sense that all the trajectories and the node indices determine the argumentation graph structure. The node indexes are necessary because if the cost is
Next, for formally stating the nondilution property, we formalize the notion of dependency. If
Dependency graph
The
For example, consider an argumentation graph
Nondilution 20 and bivariate directionality 15
If a nodge is added to an argumentation graph, the value of a variable that is not an antecedent of the nodge in the dependency graph after addition does not change.
From this property, for
Formally, the domain of variables is
Value range 41
For initial value
From now on, we assume
At
Value range at
If node 

From this, if
At
Existence of fixed point 41
A fixed point can be unstable. The dilemma in Section 3.1 and the odd-length cycle in Section 3.7.2 have unstable fixed points.
Continuity is needed as explained in the smoothness principle of Section 5.2. It is guaranteed under some conditions.
Continuity
At a fixed point, the value of a variable changes continuously according to the values of attackers, supporters, negative supporters, similar nodes, and weights if a small perturbation of the values is possible, and
To perturb the values of an attacker
The actual domain of a variable is
Constructibility
If we can choose default weights, we can make a node
We can create a node that has the value
Next, we consider an approximate solution by numerical calculation.
Set of numerical solutions
For corresponding variables
The above property carries over to the time and space averages. For the time average,
The time average of a variable has a simple form if its behavior is a fixed point or a limit cycle.
Time average of fixed point and limit cycle
If
The time average is a generalization of a simple limit in this sense.
The time average of claim relations and similarities is related, as shown in the next property.
Time average of claim relations and similarities
Suppose that
We consider properties of even-length and odd-length cycles.
Even-length cycle solution
An even-length cycle (
Odd-length cycle solution
An odd-length cycle (
From these properties and Examples 3.7.1 and 3.7.2, the solutions of even-length cycles for small
Aperiodic oscillation by multiple odd-length cycles
Suppose that
Existence of time averages for aperiodic oscillation by multiple odd-length cycles
Under the same assumptions as in Property 15, the time average of
We can draw
for
or
If
By increasing
Convergence for sufficiently large
Next, we consider the relation between the values by DECRAG and the extensions. For terminology, see Section 3.2.
Stable extension
Suppose there is no support, negative support, recursive relation, or similarity. If there is a stable extension
Group property
In the following sections, if a property is said to hold, the property holds for any initial value
In this section, the group properties introduced in QBAF
49
are discussed. The group properties were designed to be so general that they covered many similar properties with a single property. In the following, we show the simplified definitions for our case.
Because “
In the following, we use the base score. The
We assume that there is no negative support, recursive relation, or similarity,
GP1
If
GP2
If
For some initial value,
GP3
If
GP4
If
GP5
If
GP6
If
GP7
If
GP8
If
GP9
If
GP10
If
GP11
If
Property of attack and support
This section discusses the properties of attack and support
49
not covered by the group properties in Section 4.2.
Balanced
The valuation is
If If If
If If
Strictly balanced is not satisfied by DECRAG. For example, consider the case where
Monotonic
If
Strictly monotonic
If
Compensation does not hold for DECRAG. Whether the strength of supporters compensates for the smaller number of supporters depends on the supporters’ values.
Duality 51
For
This property holds even if the trajectory is a limit cycle or aperiodic oscillation.
Property of attack
In this section, we discuss the properties of attack.
12
Independence (In) 4
Suppose that
Void precedence (VP)
If
SC does not hold for DECRAG. In DECRAG, the values of
CP does not hold for DECRAG. If
QP does not hold for DECRAG. If
Counter-transitivity (CT)
If
Strict counter-transitivity (SCT)
If
Next, we consider the effect of an indirect attack. Let
Defense precedence (DP)
If
For the following property, we need a more detailed structure of the attackers. The
Distributed-defense precedence (DDP)
If
Next, we need a notion of even and odd branches.
The contrary to
Increase of defense branch (
DB)
For
Addition of attack branch (+AB)
For
Increase of attack branch (
AB)
For
Total (Tot)
Values of
Although this property seems simple, “compare” has some implications. First, the scales of the values should be the same. Consider the case where
Nonattacked equivalence (NaE)
Property of acyclic dependency graph
An argumentation graph with an acyclic dependency graph has some good properties. There is no similarity because the dependency graph must be acyclic. We assume that
Unique fixed point 52
A fixed point is unique, and the solution converges to it at
Proportional
If an attack or a negative support is added to
AvsFD does not hold for DECRAG. Suppose that
Property of similarity
There is no restriction on an argumentation graph. We assume that
Extreme similarity 41
If
Note that even if the solution of an argumentation graph converges at
GP6–GP11 with similarity
Properties 25(GP6)–30(GP11) hold with similarity under the same assumptions of GP6–GP11 and
Effect of similarity to two variables
Suppose that 
Thus, 
Evaluation
In this section, we evaluate DECRAG from various aspects. First, we confirm the advantages of DECRAG in applications in Section 5.1 and in previous principles in Section 5.2. Then, we summarize the disadvantages of DECRAG in Section 5.3. We examine the possibility of using the previous work in Section 5.4.
Advantage in application
We analyzed the classroom discussion, the formal committee and informal social networking service (SNS) discussions, and the discussion on the ethical problem.40,41,52 We applied a preliminary AF of DECRAG to the analysis, and the results are briefly explained in Sections 5.1.1–5.1.3. The advantages of DECRAG in these applications are summarized in Section 5.1.4.
Classroom discussion
We collected student opinions on user information regulation as argumentation graphs.40,41 To encourage students to add propositions and claim relations, the outcome of the addition must be predictable. So, a proposition should come stronger if it gets an additional supporter, even if the value of the supporter is low. This predictability is partially guaranteed in Properties 26 and 27.
We collected 97 graphs with 1707 propositions in total from 68 participants. The graphs consisted of attacks and supports that were attacked and supported recursively. There was no cycle of attack or support. We merged propositions with the same text and reduced the number of unique propositions to 1153. If
Some similar propositions had different values. Examples are the propositions “The management side can handle it quickly and easily” and “The management side can respond quickly to the problem.” They had
Some textually similar propositions were not so similar. An example was “You should protect your right to know” and “You should also protect your right to know.” They were textually similar, but their points were slightly different. Another example was “damage caused by leakage of personal information” and “leading to leakage of personal information.” These propositions were textually similar, but the focus of the former was on the damage, while that of the latter was the leakage. These propositions had strong similarities, but the structure reflected the difference in focus, resulting in the difference in values. So, we tuned the balance between the similarities and claim relations using the claim and similarity weights.
Formal committee discussion and informal SNS discussion
We analyzed the formal discussion of the committee on the topic “lowering the legal age of majority” and the informal SNS discussion on the topic “second Tomei expressway construction.”
52
We encoded these discussions into argumentation graphs. We are interested in the development of the discussions, and the graph development was recorded at each addition of propositions. Intuitively, we expected that the formal committee discussion would be convergent, while the informal SNS discussion would be divergent. To confirm this, we needed an objective measure of how convergent a discussion was. We considered that the claim terms of the argumentation graph, especially the last argumentation graph, of a convergent discussion have small values at a fixed point. For example, suppose that an argumentation graph is
Discussion on ethical problem
We collected opinions
52
on the ethical problem of There are five workers ahead of a trolley that is out of control without brakes, and if we do nothing, they will surely die. If you push off the man on the bridge, you can save the five workers, but the person you push off will surely die. Should we push him off?
53
The propositions were given, and the participants submitted claim relations that included recursive attacks and supports. We merged the 45 argumentation graphs into a single argumentation graph. This merge was possible using the weights so that the weight of
Application summary
We could merge multiple argumentation graphs into one argumentation graph in DECRAG utilizing the weights of claim terms (Section 5.1.3).
Similarity was used in analyzing classroom discussions (Sections 5.1.1 and 5.1.3). The advantage of DECRAG in handling similarity is that it does not restrict the similarity measure. Another advantage is that the balance between similarities and claim relations can be controlled.
The total of claim terms at a fixed point could be used to assess the degree of convergence (Section 5.1.2). This use of the claim terms is the advantage of employing the partially clasped cost model between an argumentation graph and differential equations.
In differential equations, claim terms, similarity terms, and default terms are separated. From this separation, we could identify the decisive effects of these terms at a fixed point (Section 5.1.3).
Advantage in principle
This section shows that DECRAG satisfies the principles advocated in the previous works.
Rephrasing often occurred in some corpus from the corpus-based study. 27 DECRAG draws the values of rephrased propositions closer with the help of the large similarity weight of rephrased propositions.
Two text units, despite being semantically similar, could serve different argumentative functions. 27 Because the reliability of the similarities and claim relations varies depending on the application, the balance between them should be controlled. DECRAG controls the balance using the claim and similarity weights.
If a degree of similarity was lowest, the result should be the same as without the similarity.
38
In DECRAG, if the degree of similarity is lowest
The requirements for an AF vary from one application to another. 4 To meet the requirements, the framework should be adjustable to various requirements. In DECRAG, weights can be used to adjust the framework to applications, and the framework is open to further extension by adding cost terms.
An unrestricted recursive notion of attack to attack was proposed. 46 DECRAG allows unrestricted recursion of any combination of attack, support, and negative support.
In some previous work, a necessity support was used. The necessity support was elaborated as (1) “If
The
Non-dilution 20 (bivariate directionality 15 ) requires that if a proclaim is added to an argumentation graph, values of the proclaims that do not depend on it do not change. In DECRAG, non-dilution is guaranteed by Property 4.
The three types of
To guarantee that the bipolarity-bias control is fair, we can require that attacks and supports work symmetrically by exchanging attacks and supports if other conditions are symmetrical. In DECRAG, the symmetry on attack and support is guaranteed by Property 34.
Even-length cycles could be seen as representing dilemmas, and odd-length cycles could be seen as representing paradoxes, and that, in many contexts, it was desirable to be able to represent and distinguish paradoxes and dilemmas.
56
In DECRAG, even-length cycles have three fixed points for small
The
All values should be comparable. 12 In DECRAG, this is guaranteed by Property 44.
Order semantics
12
abstract away the exact values and focus on the relative order of values. The order has meaning if most values are distinct. In DECRAG, any value in
The
A question about whether the score function can assign a final score of
The
We review the failed properties in Section 4 to examine the reasons for failures in Section 5.3.1. We discuss maximality and minimality in Section 5.3.2. Section 5.3.3 describes the computational complexity issue.
Failed properties
The following properties are not valid for DECRAG.
SC (Section 4.4): As shown in Figure 9, the attack CP (Section 4.4), QP (Section 4.4), compensation (Section 4.3): Both cardinality and quality are considered in DECRAG. Whether the strength of supporters compensates for the smaller number of supporters depends on the supporters’ values in DECRAG. Compensation was also defined as a semantics that violates both CP and QP (Section 4.4).
4
DECRAG satisfies this compensation. Strictly balanced (Section 4.3): DECRAG modified the definition of
Maximality and minimality
Maximality
57
is the property that the value of node
Next, we consider the combination of maximal and minimal values. As seen in Figure 5, for an argumentation graph of
Computational complexity
To get the time average, we have to get the solution of the differential equations for a sufficiently long time. To get the space average, we have to get the time averages for multiple initial values. So, the computational complexity is potentially high for DECRAG.
In our applications (Section 5.1), the solutions quickly converged to fixed points, even if some argumentation graphs had a cyclic part. So, we consider that most of the solutions in actual applications are (multiple) fixed points, and complex cases such as limit cycles and aperiodic oscillations are rare.
If this is not the case, there are a few methods to control the complexity. The solution becomes simpler for larger We can trade the shorter calculation time for the finer discrimination of the values (Section 2.6). We can reduce the elapsed time by parallel processing
40
because the calculations of time averages are completely independent of each other.
Previous work
In this section, we examine whether previous work could be used in our applications of Section 5.1 satisfying the principles of Section 5.2.
The extension-based semantics decides the extension of propositions, and the distinction is inherently binary: member (IN) or nonmember (OUT). The labeling semantics extends the distinction to IN, OUT, and UNDEC or more, but still only to a countable number of labels. The preorder semantics decides the preorder among propositions, but not their values. None of them satisfies the smoothness principle.
It is not straightforward to incorporate similarity into the aggregation and equational approaches. For example, in a local gradual valuation,
14
the value of proposition
The probabilistic approach is the method to extend the extension-based semantics by probability. A natural way to incorporate similarity is to consider similarity as the probability that the propositions under similarity are identical. Suppose that
In the game-theoretical approach, the value of a proposition is based on the degree of acceptability
The neural network approach uses many parameters to produce a value. To tune the parameters, we need an enormous volume of data. We did not have such a volume of data in our applications.
The differential equation approach cannot satisfy the principles of flexibility and separability. For example, the quadratic energy model
26
uses the energy
Next, we examine previous work on similarity for the argumentation. Analogy AF
31
is a tuple
The similarity-based bipolar AF
36
is defined based on the similarity 
To cope with
Conclusion
In this paper, we proposed an AF DECRAG. Taking the approach in Section 1.2, we developed the formalism in Section 2. Based on the examples in Section 3 and the theoretical properties in Section 4, the framework was shown to be useful in the evaluation of Section 5.
We took the general model-based approach to put an argumentation into a general system to observe the behavior by simulation, and to summarize the observation by averages. Due to the generality of the system, we can observe interesting behaviors, such as multiple fixed points for dilemmas and limit cycles for paradoxes. Even though it seems that the generality of the system makes it difficult to handle the system, we succeeded in proving many useful properties.
The formalism combines the argumentation graph, partially clasped cost model, differential equation, time and space averaging, and sampling calculation. Each has its part, as seen in Section 5. The key to this combination is the fixed variable, which makes the solutions of the cost model show richer behaviors than the simple minimization model.
We concentrated on the fundamental theoretical aspect of DECRAG, and there are still many research topics. We want to study the theoretical aspect of the framework further: the relationship between the structure of argumentation graphs and the behaviors of their differential equations, the meaning of the partially clasped cost and the differential equations generated from it, the condition of the existence of the time average, and better estimations of the variances. We studied the relationship between existing models and DECRAG by examples in Section 3 and found Property 19. We would like to study the relationship with more existing models theoretically and empirically. We applied a preliminary version of DECRAG to the limited cases.40,41,52 We would like to extend these experiments to more practical situations to clarify DECRAG’s applicability. We also want to study artificial argumentation graphs by DECRAG, extending the experiment 40 on argumentation graphs in International Competition on Computational Models of Argumentation (ICCMA) (https://argumentationcompetition.org/).
Footnotes
Acknowledgment
We would like to thank anonymous reviewers for their constructive and excellent comments. This work was partially supported by JSPS KAKENHI Grant Number JP24K15093.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Appendix A Proof
First, we clarify the notation and typical expressions. In the proofs, we consider some property in variable
To simplify the proofs, we introduce some lemmas.
Hereafter,
In the following, indexes of attackers and supporters of